
Hovering is the most challenging part of flying a helicopter. This is because a helicopter generates its own gusty air while in a hover, which acts against the fuselage and flight control surfaces. The end result is constant control inputs and corrections by the pilot to keep the helicopter where it is required to be. Despite the complexity of the task, the control inputs in a hover are simple.
The cyclic is used to eliminate drift in the horizontal plane, controlling forward, backward, right and left movement or travel. The throttle, if not governor controlled, is used to control revolutions per minute (rpm). The collective is used to maintain altitude. The pedals are used to control nose direction or heading. It is the interaction of these controls that makes hovering difficult, since an adjustment in any one control requires an adjustment of the other two, creating a cycle of constant correction.
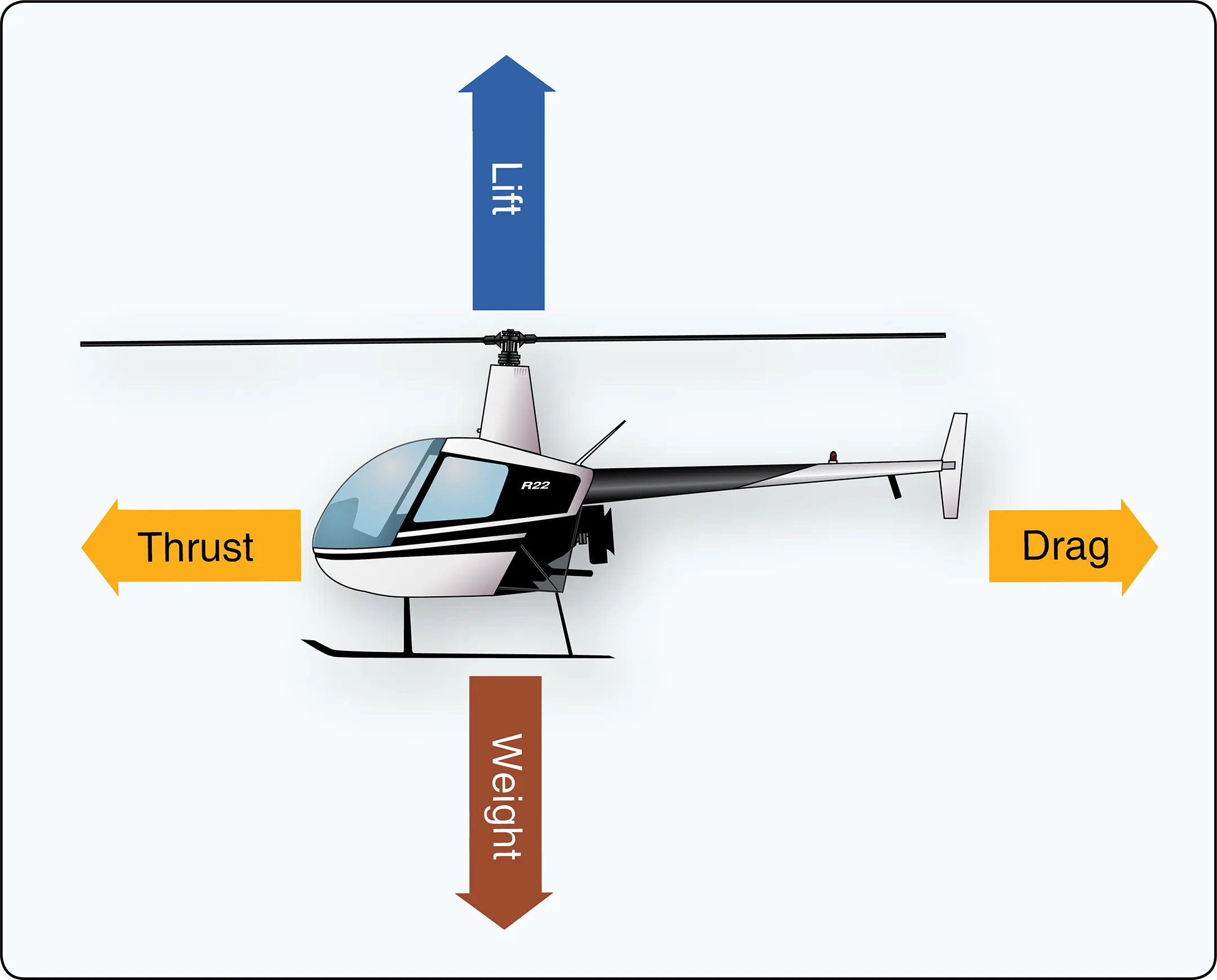
During hovering flight, a helicopter maintains a constant position over a selected point, usually a few feet above the ground. The ability of the helicopter to hover comes from the both the lift component, which is the force developed by the main rotor(s) to overcome gravity and aircraft weight, and the thrust component, which acts horizontally to accelerate or decelerate the helicopter in the desired direction. Pilots direct the thrust of the rotor system by using the cyclic to change the tip-path plane as compared to the visible horizon to induce travel or compensate for the wind and hold a position. At a hover in a no-wind condition, all opposing forces (lift, thrust, drag, and weight) are in balance; they are equal and opposite. Therefore, lift and weight are equal, resulting in the helicopter remaining at a stationary hover. [Figure 1]
While hovering, the amount of main rotor thrust can be changed to maintain the desired hovering altitude. This is done by changing the angle of incidence (by moving the collective) of the rotor blades and hence the angle of attack (AOA) of the main rotor blades. Changing the AOA changes the drag on the rotor blades, and the power delivered by the engine must change as well to keep the rotor speed constant.
The weight that must be supported is the total weight of the helicopter and its occupants. If the amount of lift is greater than the actual weight, the helicopter accelerates upwards until the lift force equals the weight gain altitude; if thrust is less than weight, the helicopter accelerates downward. When operating near the ground, the effects of the proximity to the surface change this response.
The drag of a hovering helicopter is mainly induced drag incurred while the blades are producing lift. There is, however, some profile drag on the blades as they rotate through the air and a small amount of parasite drag from the non-lift-producing surfaces of the helicopter, such as the rotor hub, cowlings, and landing gear. Throughout the rest of this discussion, the term “drag” includes induced, profile and parasite drag.
An important consequence of producing thrust is torque. Newton’s Third Law, for every action there is an equal and opposite reaction. Therefore, as the engine turns the main rotor system in a counterclockwise direction, the helicopter fuselage wants to turn clockwise. The amount of torque is directly related to the amount of engine power being used to turn the main rotor system. Remember, as power changes, torque changes.
To counteract this torque-induced turning tendency, an antitorque rotor or tail rotor is incorporated into most helicopter designs. A pilot can vary the amount of thrust produced by the tail rotor in relation to the amount of torque produced by the engine. As the engine supplies more power to the main rotor, the tail rotor must produce more thrust to overcome the increased torque effect. This control change is accomplished through the use of antitorque pedals.
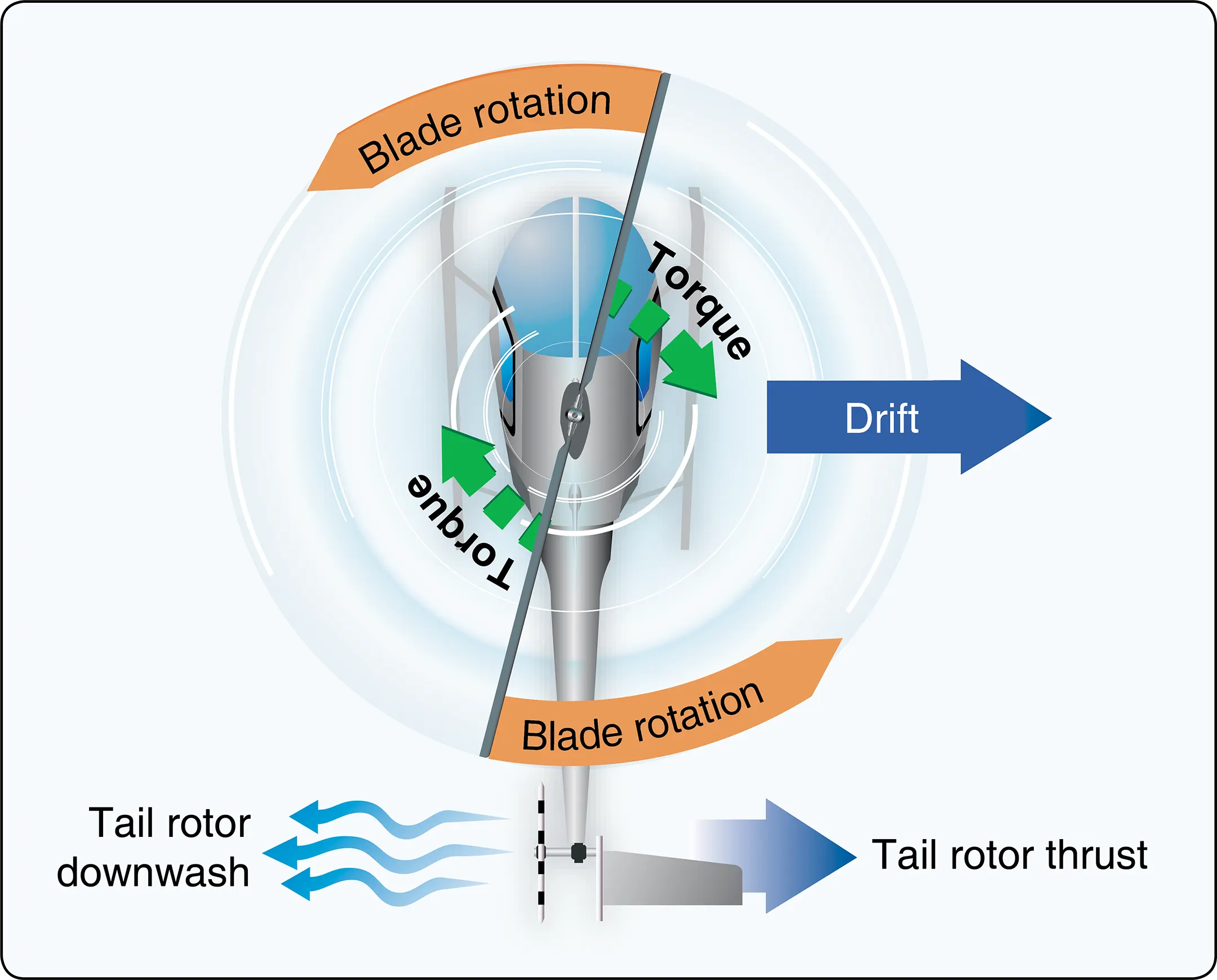
Translating Tendency (Drift)
During hovering flight, a single main rotor helicopter tends to move in the direction of tail rotor thrust. This lateral (or sideward) movement is called translating tendency. [Figure 2]
To counteract this tendency, one or more of the following features may be used. All examples are for a counterclockwise rotating main rotor system.
- The main transmission is mounted at a slight angle to the left (when viewed from behind) so that the rotor mast has a built-in tilt to oppose the tail rotor thrust.
- Flight controls can be rigged so that the rotor disk is tilted to the left slightly when the cyclic is centered. Whichever method is used, the tip-path plane is tilted slightly to the left in the hover.
- If the transmission is mounted so the rotor shaft is vertical with respect to the fuselage, the helicopter “hangs” left skid low in the hover. The opposite is true for rotor systems turning clockwise when viewed from above. The helicopter fuselage will also be tilted when the tail rotor is below the main rotor disk and supplying antitorque thrust. The fuselage tilt is caused by the imperfect balance of the tail rotor thrust against the main rotor torque in the same plane. The helicopter tilts due to two separate forces, the main rotor disk tilt to neutralize the translating tendency and the lower tail rotor thrust below the plane of the torque action.
- In forward flight, the tail rotor continues to push to the right, and the helicopter makes a small angle with the wind when the rotors are level and the slip ball is in the middle. This is called inherent sideslip. For some larger helicopters, the vertical fin or stabilizer is often designed with the tail rotor mounted on them to correct this side slip and to eliminate some of the tilting at a hover. Also, by mounting the tail rotor on top of the vertical fin or pylon, the antitorque is more in line with or closer to the horizontal plane of torque, resulting in less airframe (or body) lean from the tail rotor. Having the tail rotor higher off the ground reduces the risk of objects coming in contact with the blades, but at the cost of increased weight and complexity.
Pendular Action
Since the fuselage of the helicopter, with a single main rotor, is suspended from a single point and has considerable mass, it is free to oscillate either longitudinally or laterally in the same way as a pendulum. This pendular action can be exaggerated by overcontrolling; therefore, control movements should be smooth and not exaggerated. [Figure 3]
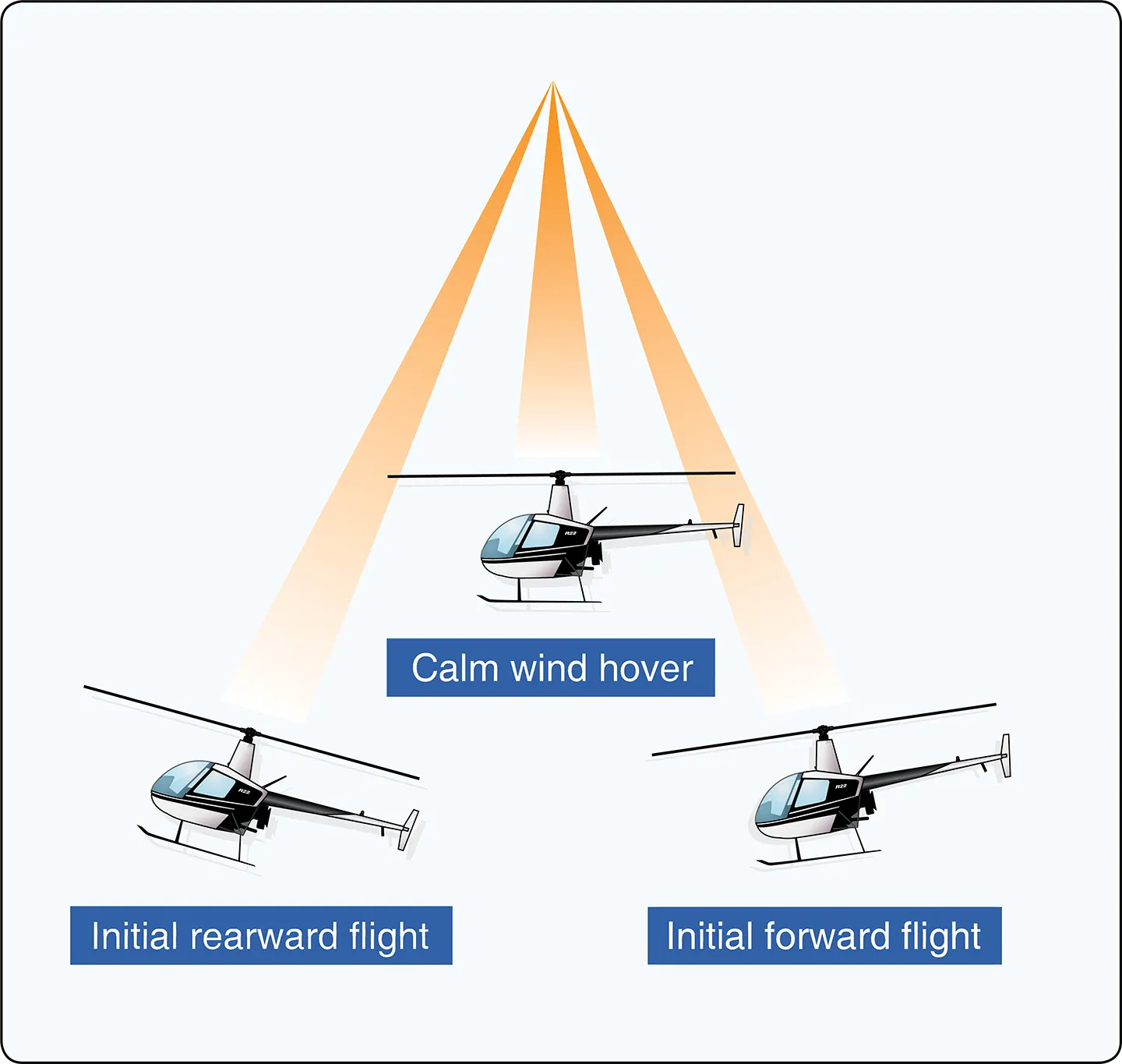
The horizontal stabilizer tends to level the airframe in forward flight. However, in rearward flight, the horizontal stabilizer can press the tail downward, resulting in a tail strike if the helicopter is moved into the wind. Normally, with the helicopter mostly into the wind, the horizontal stabilizer experiences less headwind component as the helicopter begins rearward travel (downwind). When rearward flight groundspeed equals the windspeed, then the helicopter is merely hovering in a no-wind condition. However, rearward hovering into the wind requires considerable care and caution to prevent tail strikes.It is important to note that there is a difference in the amount of pendular action between a semirigid system and a fully articulated system. Because of the hard connection (offset) of the latter, the centrifugal force pulling out on the blades is transferred to the fuselage, and the fuselage tends to follow the rotor attitude. The semirigid system is a true pendulum, with thrust required to create a moment around the fuselage CG to allow for control of the fuselage.
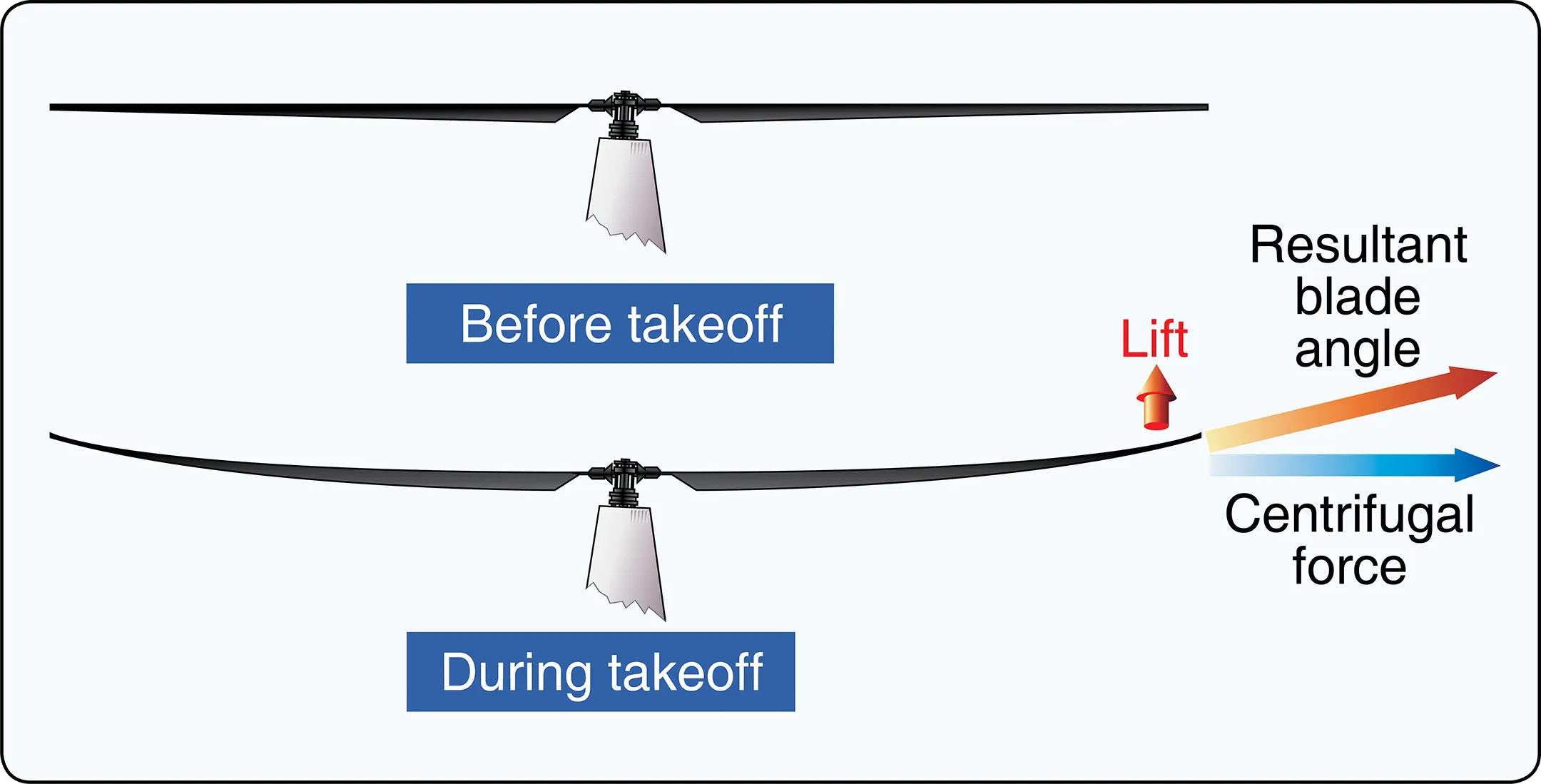
Coning
In order for a helicopter to generate lift, the rotor blades must be turning. Rotor system rotation drives the blades into the air, creating a relative wind component without having to move the airframe through the air as with an airplane or glider. Depending on the motion of the blades and helicopter airframe, many factors cause the relative wind direction to vary. The rotation of the rotor system creates centrifugal force (inertia), which tends to pull the blades straight outward from the main rotor hub. The faster the rotation is, the greater the centrifugal force; and the slower the rotation is, the smaller the centrifugal force. This force gives the rotor blades their rigidity and, in turn, the strength to support the weight of the helicopter. The maximum centrifugal force generated is determined by the maximum operating rotor revolutions per minute (rpm).As lift on the blades is increased (in a takeoff, for example), two major forces are acting at the same time—centrifugal force acting outward, and lift acting upward. The result of these two forces is that the blades assume a conical path instead of remaining in the plane perpendicular to the mast. This can be seen in any helicopter when it takes off; the rotor disk changes from flat to a slight cone shape. [Figure 4]
If the rotor rpm is allowed to go too low (below the minimum power-on rotor rpm, for example), the centrifugal force becomes smaller and the coning angle becomes much larger. In other words, should the rpm decrease too much, at some point the rotor blades fold up with no chance of recovery.
Coriolis Effect (Law of Conservation of Angular Momentum)
The Coriolis Effect is also referred to as the law of conservation of angular momentum. It states that the value of angular momentum of a rotating body does not change unless an external force is applied. In other words, a rotating body continues to rotate with the same rotational velocity until some external force is applied to change the speed of rotation. Angular momentum is the moment of inertia (mass times distance from the center of rotation squared) multiplied by the speed of rotation.
Changes in angular velocity, known as angular acceleration and deceleration, take place as the mass of a rotating body is moved closer to or farther away from the axis of rotation. The speed of the rotating mass varies proportionately with the square of the radius.
An excellent example of this principle in action is a figure skater performing a spin on ice skates. The skater begins rotation on one foot, with the other leg and both arms extended. The rotation of the skater’s body is relatively slow. When a skater draws both arms and one leg inward, the moment of inertia (mass times radius squared) becomes much smaller and the body is rotating almost faster than the eye can follow. Because the angular momentum must, by law of nature, remain the same (no external force applied), the angular velocity must increase.
The rotor blade rotating about the rotor hub possesses angular momentum. As the rotor begins to cone due to G-loading maneuvers, the diameter or the rotor disk shrinks. Due to conservation of angular momentum, the blades continue to travel the same speed even though the blade tips have a shorter distance to travel due to reduced disk diameter. The action results in an increase in rotor rpm which causes a slight increase in lift. Most pilots arrest this increase of rpm with an increase in collective pitch. This increase in blade rpm lift is somewhat negated by the slightly smaller disk area as the blades cone upward.
Gyroscopic Precession
The spinning main rotor of a helicopter acts like a gyroscope. As such, it has the properties of gyroscopic action, one of which is precession. Gyroscopic precession is the resultant action or deflection of a spinning object when a force is applied to this object. This action occurs approximately 90° in the direction of rotation from the point where the force is applied (or 90° later in the rotation cycle). [Figure 5]
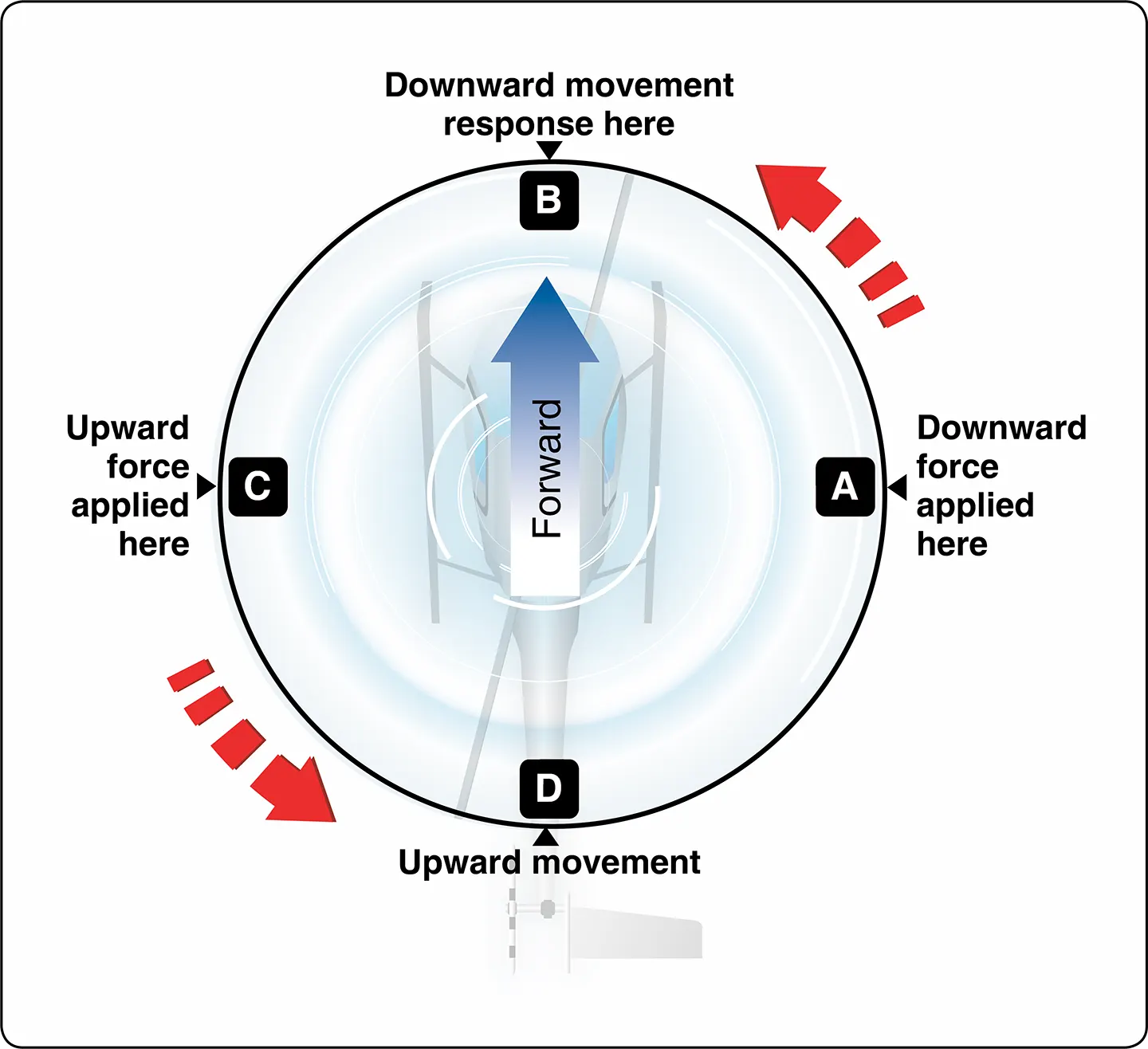
Examine a two-bladed rotor system to see how gyroscopic precession affects the movement of the tip-path plane. Moving the cyclic pitch control increases the angle of incidence of one rotor blade with the result of a greater lifting force being applied at that point in the plane of rotation. This same control movement simultaneously decreases the angle of incidence of the other blade the same amount, thus decreasing the lifting force applied at that point in the plane of rotation. The blade with the increased angle of incidence tends to flap up; the blade with the decreased angle of incidence tends to flap down. Because the rotor disk acts like a gyro, the blades reach maximum deflection at a point approximately 90° later in the plane of rotation.
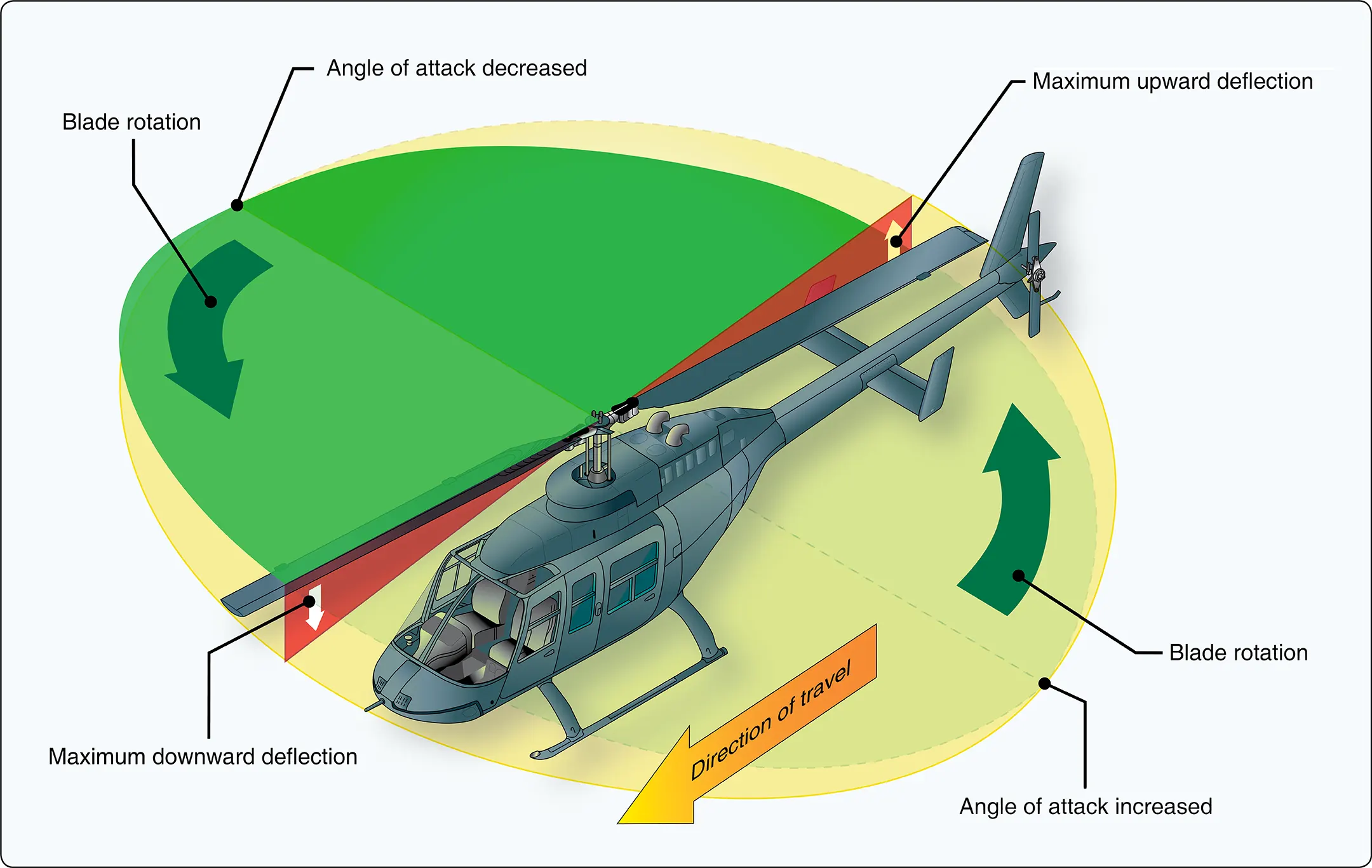
Figure 6 illustrates the result of a forward cyclic input. The retreating blade angle of incidence is increased and the advancing blade angle of incidence is decreased resulting in a tipping forward of the tip-path plane, since maximum deflection takes place 90° later when the blades are at the rear and front, respectively.
In a rotor system using three or more blades, the movement of the cyclic pitch control changes the angle of incidence of each blade an appropriate amount so that the end result is the same.