
There are three major controls in a helicopter that the pilot must use during flight. They are the collective pitch control, the cyclic pitch control, and the antitorque pedals or tail rotor control. In addition to these major controls, the pilot must also use the throttle control, which is usually mounted directly to the collective pitch control in order to fly the helicopter. In this post the control systems described are not limited to the single main rotor type helicopter but are employed in one form or another in most helicopter configurations. All examples in this post refer to a counterclockwise main rotor blade rotation as viewed from above. If flying a helicopter with a clockwise rotation, left and right references must be reversed, particularly in the areas of rotor blade pitch change, antitorque pedal movement, and tail rotor thrust.
Collective Pitch Control
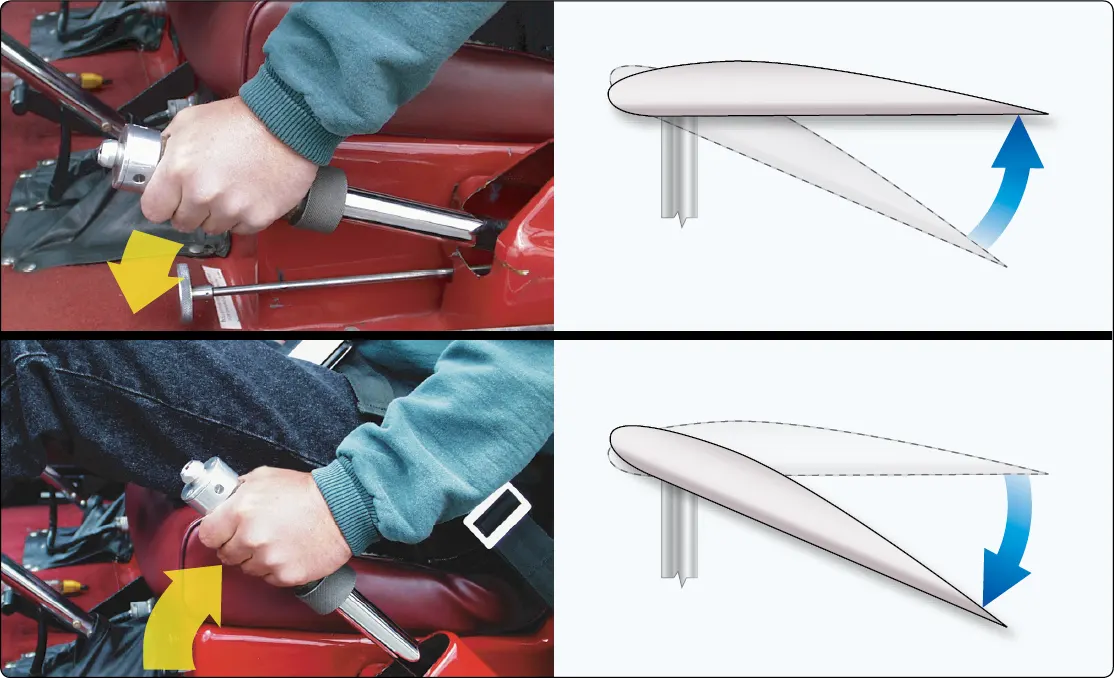
The collective pitch control (or simply “collective” or “thrust lever”) is located on the left side of the pilot’s seat and is operated with the left hand. The collective is used to make changes to the pitch angle of the main rotor blades and does this simultaneously, or collectively, as the name implies. As the collective pitch control is raised, there is a simultaneous and equal increase in pitch angle of all main rotor blades; as it is lowered, there is a simultaneous and equal decrease in pitch angle. This is done through a series of mechanical linkages and the amount of movement in the collective lever determines the amount of blade pitch change. [Figure 1] An adjustable friction control helps prevent inadvertent collective pitch movement.
Changing the pitch angle on the blades changes the angle of incidence on each blade. With a change in angle of incidence comes a change in drag, which affects the speed or revolutions per minute (rpm) of the main rotor. As the pitch angle increases, angle of incidence increases, drag increases, and rotor rpm decreases. Decreasing pitch angle decreases both angle of incidence and drag, while rotor rpm increases. In order to maintain a constant rotor rpm, which is essential in helicopter operations, a proportionate change in power is required to compensate for the change in drag. This is accomplished with the throttle control or governor, which automatically adjusts engine power.
Throttle Control
The function of the throttle is to regulate engine rpm. If the correlator or governor system does not maintain the desired rpm when the collective is raised or lowered, or if those systems are not installed, the throttle must be moved manually with the twist grip in order to maintain rpm. The throttle control is much like a motorcycle throttle, and works in virtually the same way. Twisting the throttle to the left increases rpm; twisting the throttle to the right decreases rpm. [Figure 2]
 |
| Figure 2. A twist grip throttle is usually mounted on the end of the collective lever. The throttles on some turbine helicopters are mounted on the overhead panel or on the floor in the cockpit |
Governor/Correlator
A governor is a sensing device that senses rotor and engine rpm and makes the necessary adjustments in order to keep rotor rpm constant. In normal operations, once the rotor rpm is set, the governor keeps the rpm constant, and there is no need to make any throttle adjustments. Governors are common on all turbine helicopters (as it is a function of the fuel control system of the turbine engine), and used on some piston powered helicopters.
A correlator is a mechanical connection between the collective lever and the engine throttle. When the collective lever is raised, power is automatically increased; when lowered, power is decreased. This system maintains rpm close to the desired value, but still requires adjustment of the throttle for fine tuning.
Some helicopters do not have correlators or governors and require coordination of all collective and throttle movements. When the collective is raised, the throttle must be increased; when the collective is lowered, the throttle must be decreased. As with any aircraft control, large adjustments of either collective pitch or throttle should be avoided. All corrections should be made through the use of smooth pressure.
In piston helicopters, the collective pitch is the primary control for manifold pressure, and the throttle is the primary control for rpm. However, the collective pitch control also influences rpm, and the throttle also influences manifold pressure; therefore, each is considered to be a secondary control of the other’s function. Both the tachometer (rpm indicator) and the manifold pressure gauge must be analyzed to determine which control to use. Figure 3 illustrates this relationship.
 |
| Figure 3. Relationship between rpm, manifold pressure, collective, and throttle |
Cyclic Pitch Control
The cyclic pitch control is usually projected upward from the cockpit floor, between the pilot’s legs or between the two pilot seats in some models. [Figure 4] This primary flight control allows the pilot to fly the helicopter in any direction of travel: forward, rearward, left, and right. As discussed in Aerodynamics of Flight section, the total lift force is always perpendicular to the tip-path plane of the main rotor. The purpose of the cyclic pitch control is to tilt the tip-path plane in the direction of the desired horizontal direction. The cyclic controls the rotor disk tilt versus the horizon, which directs the rotor disk thrust to enable the pilot to control the direction of travel of the helicopter.
 |
| Figure 4. The cyclic pitch control may be mounted vertically between the pilot’s knees or on a teetering bar from a single cyclic located in the center of the helicopter. The cyclic can pivot in all directions |
The rotor disk tilts in the same direction the cyclic pitch control is moved. If the cyclic is moved forward, the rotor disk tilts forward; if the cyclic is moved aft, the disk tilts aft, and so on. Because the rotor disk acts like a gyro, the mechanical linkages for the cyclic control rods are rigged in such a way that they decrease the pitch angle of the rotor blade approximately 90° before it reaches the direction of cyclic displacement, and increase the pitch angle of the rotor blade approximately 90° after it passes the direction of displacement. An increase in pitch angle increases AOA; a decrease in pitch angle decreases AOA. For example, if the cyclic is moved forward, the AOA decreases as the rotor blade passes the right side of the helicopter and increases on the left side. This results in maximum downward deflection of the rotor blade in front of the helicopter and maximum upward deflection behind it, causing the rotor disk to tilt forward.
Antitorque Pedals
The antitorque pedals, located on the cabin floor by the pilot’s feet, control the pitch and therefore the thrust of the tail rotor blades or other antitorque system. See Helicopter Components, Sections, and Systems, for a discussion on these other systems. [Figure 5] Newton’s Third Law was discussed in Forces Acting on the Aircraft post, stating that for every action there is an equal and opposite reaction. This law applies to the helicopter fuselage and its rotation in the opposite direction of the main rotor blades unless counteracted and controlled. To make flight possible and to compensate for this torque, most helicopter designs incorporate an antitorque rotor or tail rotor. The antitorque pedals allow the pilot to control the pitch angle of the tail rotor blades, which in forward flight puts the helicopter in longitudinal trim and, while at a hover, enables the pilot to turn the helicopter 360°. The antitorque pedals are connected to the pitch change mechanism on the tail rotor gearbox and allow the pitch angle on the tail rotor blades to be increased or decreased.
 |
| Figure 5. Antitorque pedals compensate for changes in torque and control heading in a hover |
Heading Control
The tail rotor is used to control the heading of the helicopter while hovering or when making hovering turns, as well as counteracting the torque of the main rotor. Hovering turns are commonly referred to as “pedal turns.”
At speeds above translational lift, the pedals are used to compensate for torque to put the helicopter in longitudinal trim so that coordinated flight can be maintained. The cyclic control is used to change heading by making a turn to the desired direction.
The thrust of the tail rotor depends on the pitch angle of the tail rotor blades. This pitch angle can be positive, negative, or zero. A positive pitch angle tends to move the tail to the right. A negative pitch angle moves the tail to the left, while no thrust is produced with a zero pitch angle. The maximum positive pitch angle of the tail rotor is generally greater than the maximum negative pitch angle available. This is because the primary purpose of the tail rotor is to counteract the torque of the main rotor. The capability for tail rotors to produce thrust to the left (negative pitch angle) is necessary, because during autorotation the drag of the transmission tends to yaw the nose to the left, or in the same direction the main rotor is turning.
From the neutral position, applying right pedal causes the nose of the helicopter to yaw right and the tail to swing to the left. Pressing on the left pedal has the opposite effect: the nose of the helicopter yaws to the left and the tail swings right. [Figure 6]
 |
| Figure 6. Tail rotor pitch angle and thrust in relation to pedal positions during cruising flight |
With the antitorque pedals in the neutral position, the tail rotor has a medium positive pitch angle. In medium positive pitch, the tail rotor thrust approximately equals the torque of the main rotor during cruise flight, so the helicopter maintains a constant heading in level flight.
A vertical fin or stabilizer is used in many single-rotor helicopters to help aid in heading control. The fin is designed to optimize directional stability in flight with a zero tail rotor thrust setting. The size of the fin is crucial to this design. If the surface is too large, the tail rotor thrust may be blocked. Heading control would be more difficult at slower airspeeds and at a hover and the vertical fin would then weathervane.
Helicopters that are designed with tandem rotors do not have an antitorque rotor. The helicopter is designed with both rotor systems rotating in opposite directions to counteract the torque rather than a tail rotor. Directional antitorque pedals are used for directional control of the aircraft while in flight, as well as while taxiing with the forward gear off the ground.
In intermeshing rotor systems, which are a set of two rotors turning in opposite directions with each rotor mast mounted on the helicopter with a slight angle to the other so that the blades intermesh without colliding, and a coaxial rotor systems, which are a pair of rotors mounted one above the other on the same shaft and turning in opposite directions, the heading pedals control the heading of the helicopter while at a hover by imbalancing torque between the rotors, allowing for the torque to turn the helicopter.