
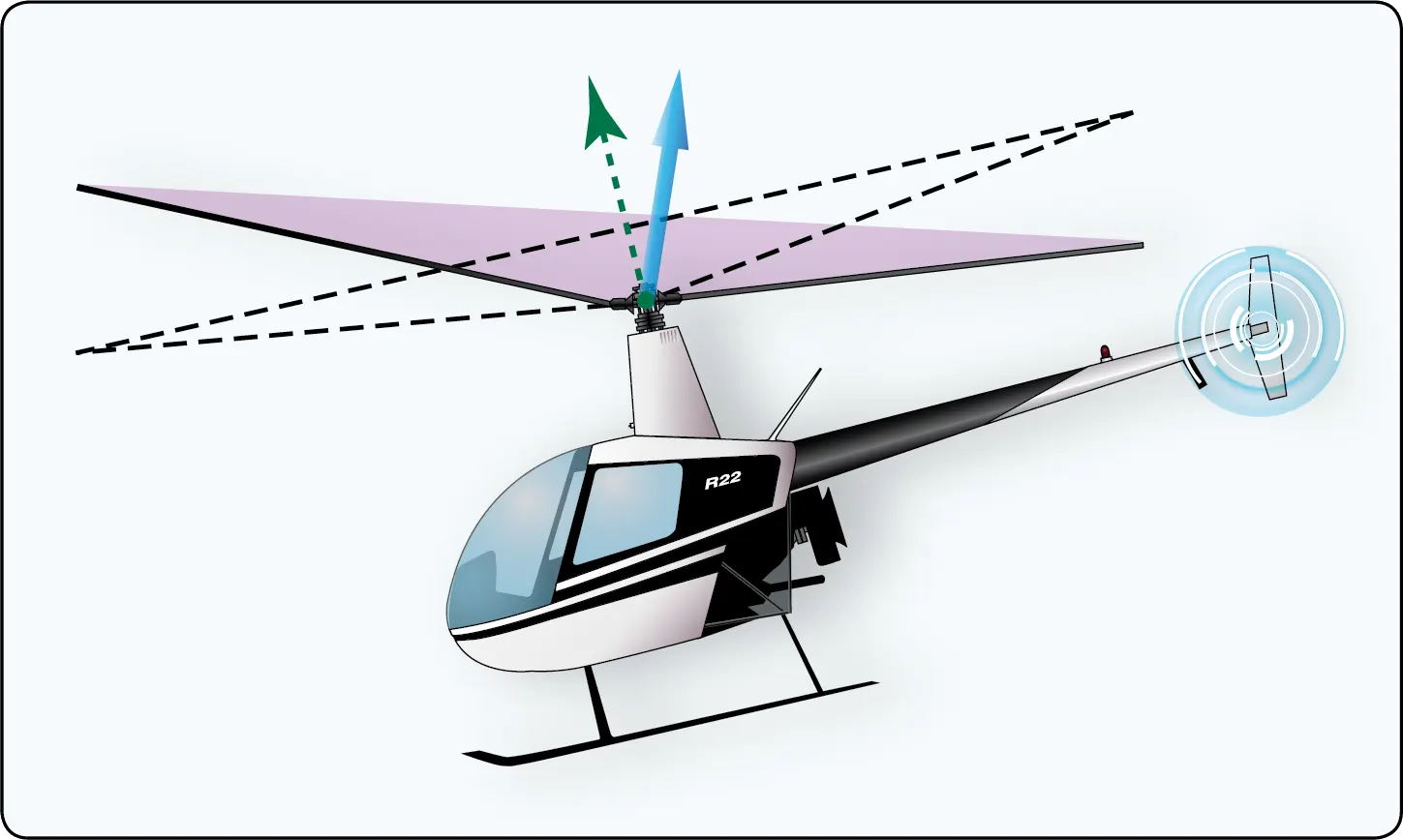
In steady forward flight, with no change in airspeed or vertical speed, the four forces of lift, thrust, drag, and weight must be in balance. Once the tip-path plane is tilted forward, the total lift-thrust force is also tilted forward. This resultant lift-thrust force can be resolved into two components—lift acting vertically upward and thrust acting horizontally in the direction of flight. In addition to lift and thrust, there is weight (the downward acting force) and drag (the force opposing the motion of an airfoil through the air). [Figure 1]
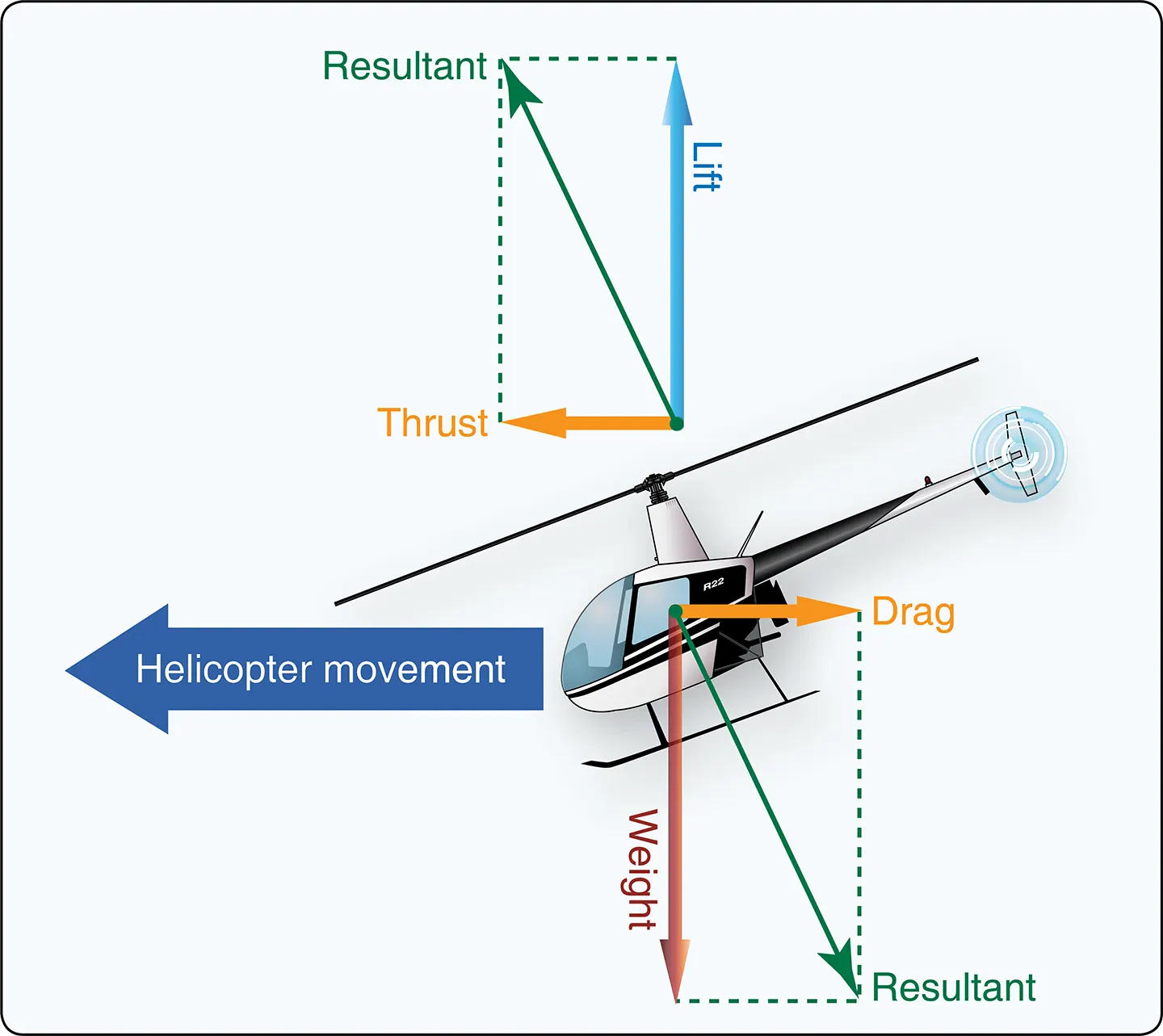
In straight-and-level, unaccelerated forward flight (straight-and-level flight is flight with a constant heading and at a constant altitude), lift equals weight and thrust equals drag. If lift exceeds weight, the helicopter accelerates vertically until the forces are in balance; if thrust is less than drag, the helicopter slows down until the forces are in balance. As the helicopter moves forward, it begins to lose altitude because lift is lost as thrust is diverted forward.
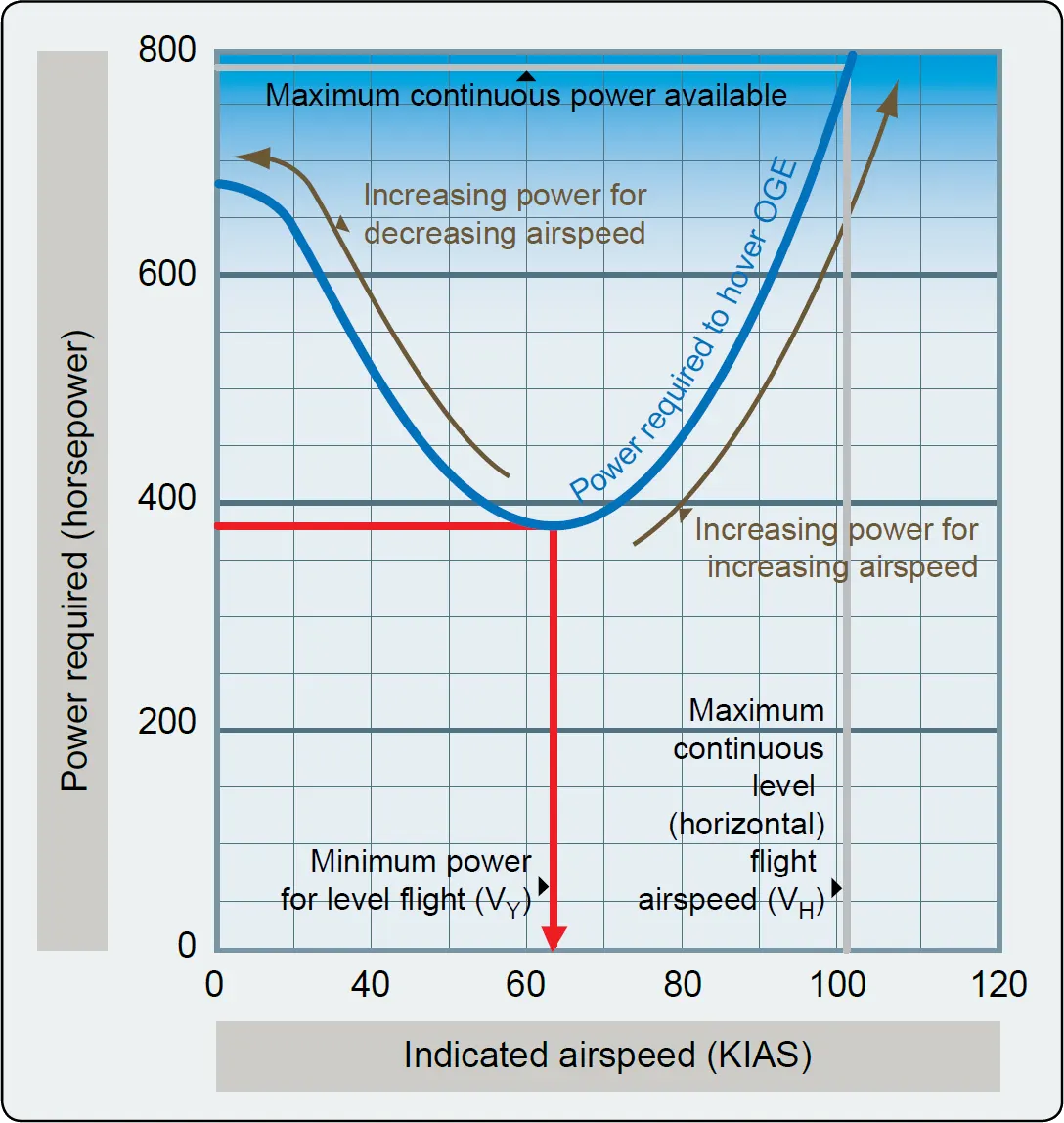
However, as the helicopter begins to accelerate from a hover, the rotor system becomes more efficient due to translational lift. The result is excess power over that which is required to hover. Continued acceleration causes an even larger increase in airflow, to a point, through the rotor disk and more excess power. In order to maintain unaccelerated flight, the pilot must understand that with any changes in power or in cyclic movement, the helicopter begins either to climb or to descend. Once straight-and-level flight is obtained, the pilot should make note of the power (torque setting) required and not make major adjustments to the flight controls. [Figure 2]
Airflow in Forward Flight
Airflow across the rotor system in forward flight varies from airflow at a hover. In forward flight, air flows opposite the aircraft’s flightpath. The velocity of this air flow equals the helicopter’s forward speed. Because the rotor blades turn in a circular pattern, the velocity of airflow across a blade depends on the position of the blade in the plane of rotation at a given instant, its rotational velocity, and airspeed of the helicopter.
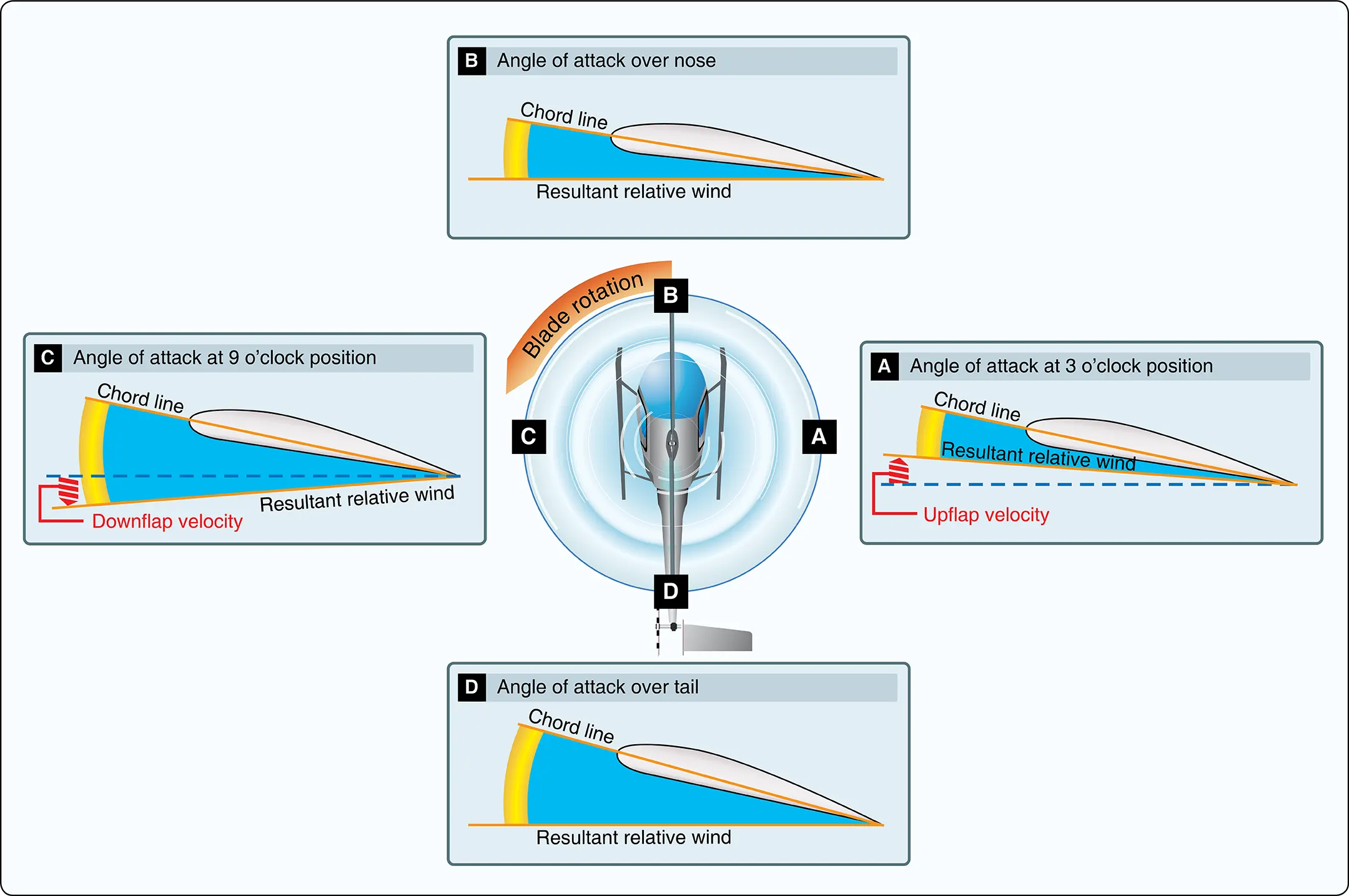
Therefore, the airflow meeting each blade varies continuously as the blade rotates. The highest velocity of airflow occurs over the right side (3 o’clock position) of the helicopter (advancing blade in a rotor system that turns counterclockwise) and decreases to rotational velocity over the nose. It continues to decrease until the lowest velocity of airflow occurs over the left side (9 o’clock position) of the helicopter (retreating blade). As the blade continues to rotate, velocity of the airflow then increases to rotational velocity over the tail. It continues to increase until the blade is back at the 3 o’clock position.
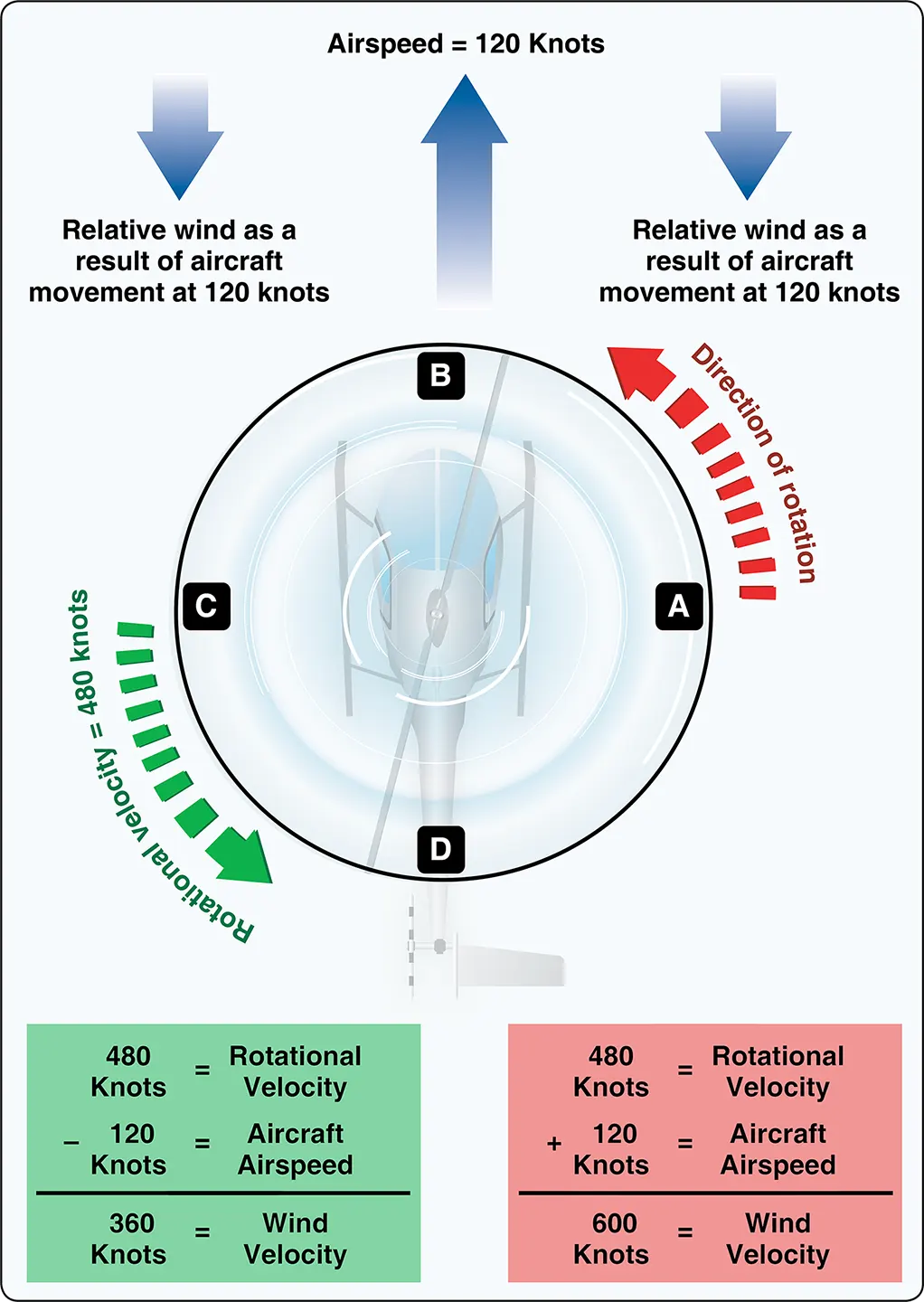
The advancing blade in Figure 3, position A, moves in the same direction as the helicopter. The velocity of the air meeting this blade equals rotational velocity of the blade plus wind velocity resulting from forward airspeed. The retreating blade (position C) moves in a flow of air moving in the opposite direction of the helicopter. The velocity of airflow meeting this blade equals rotational velocity of the blade minus wind velocity resulting from forward airspeed. The blades (positions B and D) over the nose and tail move essentially at right angles to the airflow created by forward airspeed; the velocity of airflow meeting these blades equals the rotational velocity. This results in a change to velocity of airflow all across the rotor disk and a change to the lift pattern of the rotor system.
Advancing Blade
As the relative wind speed of the advancing blade increases, the blade gains lift and begins to flap up. It reaches its maximum upflap velocity at the 3 o’clock position, where the wind velocity is the greatest. This upflap creates a downward flow of air and has the same effect as increasing the induced flow velocity by imposing a downward vertical velocity vector to the relative wind which decreases the AOA.
Retreating Blade
As relative wind speed of the retreating blade decreases, the blade loses lift and begins to flap down. It reaches its maximum downflap velocity at the 9 o’clock position, where wind velocity is the least. This downflap creates an upward flow of air and has the same effect as decreasing the induced flow velocity by imposing an upward velocity vertical vector to the relative wind which increases the AOA.
Dissymmetry of Lift
Dissymmetry of lift is the differential (unequal) lift between advancing and retreating halves of the rotor disk caused by the different wind flow velocity across each half. This difference in lift would cause the helicopter to be uncontrollable in any situation other than hovering in a calm wind. There must be a means of compensating, correcting, or eliminating this unequal lift to attain symmetry of lift.
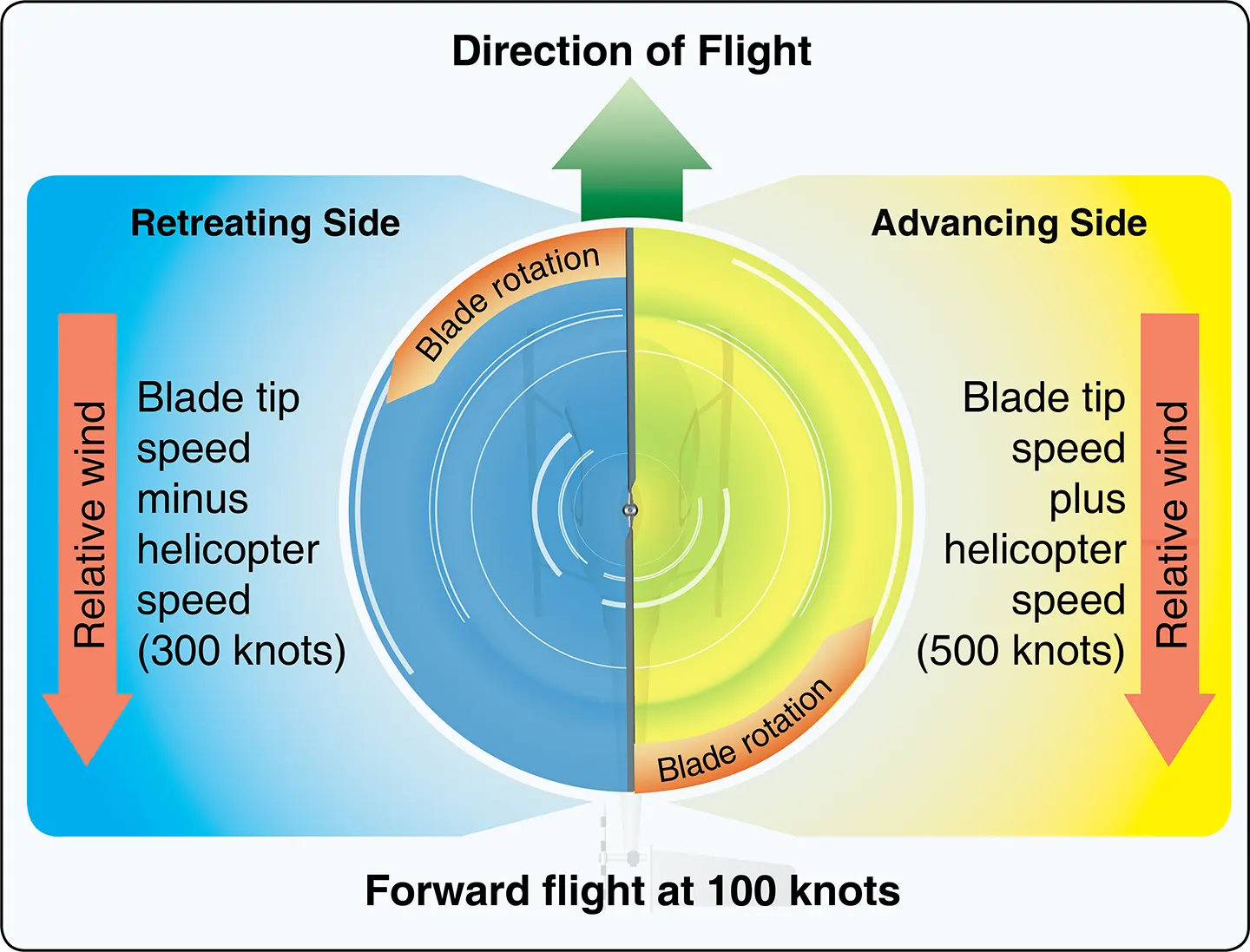
When the helicopter moves through the air, the relative airflow through the main rotor disk is different on the advancing side than on the retreating side. The relative wind encountered by the advancing blade is increased by the forward speed of the helicopter, while the relative wind speed acting on the retreating blade is reduced by the helicopter’s forward airspeed. Therefore, as a result of the relative wind speed, the advancing blade side of the rotor disk can produce more lift than the retreating blade side. [Figure 4]
If this condition were allowed to exist, a helicopter with a counterclockwise main rotor blade rotation would roll to the left because of the difference in lift. In reality, the main rotor blades flap and feather automatically to equalize lift across the rotor disk. Articulated rotor systems, usually with three or more blades, incorporate a horizontal hinge (flapping hinge) to allow the individual rotor blades to move, or flap up and down as they rotate. A semi-rigid rotor system (two blades) utilizes a teetering hinge, which allows the blades to flap as a unit. When one blade flaps up, the other blade flaps down.
As shown in Figure 5, as the rotor blade reaches the advancing side of the rotor disk (A), it reaches its maximum up flap velocity. When the blade flaps upward, the angle between the chord line and the resultant relative wind decreases. This decreases the AOA, which reduces the amount of lift produced by the blade. At position (C), the rotor blade is now at its maximum down flapping velocity. Due to down flapping, the angle between the chord line and the resultant relative wind increases. This increases the AOA and thus the amount of lift produced by the blade.
The combination of blade flapping and slow relative wind acting on the retreating blade normally limits the maximum forward speed of a helicopter. At a high forward speed, the retreating blade stalls because of a high AOA and slow relative wind speed. This situation is called retreating blade stall and is evidenced by a nose pitch up, vibration, and a rolling tendency—usually to the left in helicopters with counterclockwise blade rotation.
Pilots can avoid retreating blade stall by not exceeding the never-exceed speed. This speed is designated VNE and is indicated on a placard and marked on the airspeed indicator by a red line.
Blade flapping compensates for dissymmetry of lift in the following way. At a hover, equal lift is produced around the rotor system with equal pitch (AOI) on all the blades and at all points in the rotor system (disregarding compensation for translating tendency). The rotor disk is parallel to the horizon. To develop a thrust force, the rotor system must be tilted in the desired direction of movement. Cyclic feathering changes the angle of incidence differentially around the rotor system. Forward cyclic movements decrease the angle of incidence at one part on the rotor system while increasing the angle in another part.
When transitioning to forward flight either from a hover or taking off from the ground, pilots must be aware that as the helicopter speed increases, translational lift becomes more effective and causes the nose to rise, or pitch up (sometimes referred to as blowback). This tendency is caused by the combined effects of dissymmetry of lift and transverse flow.
Pilots must correct for this tendency to maintain a constant rotor disk attitude that will move the helicopter through the speed range in which blowback occurs. If the nose is permitted to pitch up while passing through this speed range, the aircraft may also tend to roll to the right. To correct for this tendency, the pilot must continuously move the cyclic forward as velocity of the helicopter increases until the takeoff is complete and the helicopter has transitioned into forward flight.
Figure 6 illustrates the changes in pitch angle as the cyclic is moved forward at increased airspeeds. At a hover, the cyclic is centered and the pitch angle on the advancing and retreating blades is the same. At low forward speeds, moving the cyclic forward reduces pitch angle on the advancing blade and increases pitch angle on the retreating blade. This causes a slight rotor tilt. At higher forward speeds, the pilot must continue to move the cyclic forward. This further reduces pitch angle on the advancing blade and further increases pitch angle on the retreating blade. As a result, there is even more tilt to the rotor than at lower speeds.
A horizontal lift component (thrust) generates higher helicopter airspeed. The higher airspeed induces blade flapping to maintain symmetry of lift. The combination of flapping and cyclic feathering maintains symmetry of lift and desired attitude on the rotor system and helicopter.
Translational Lift
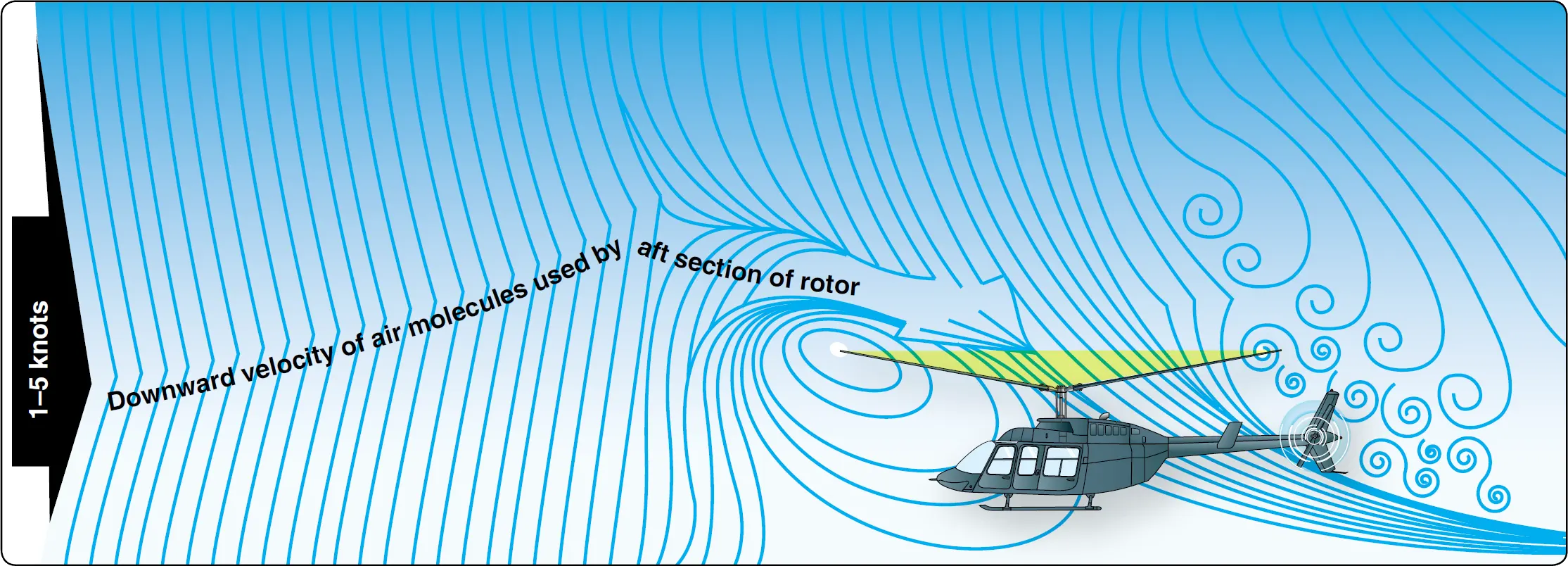
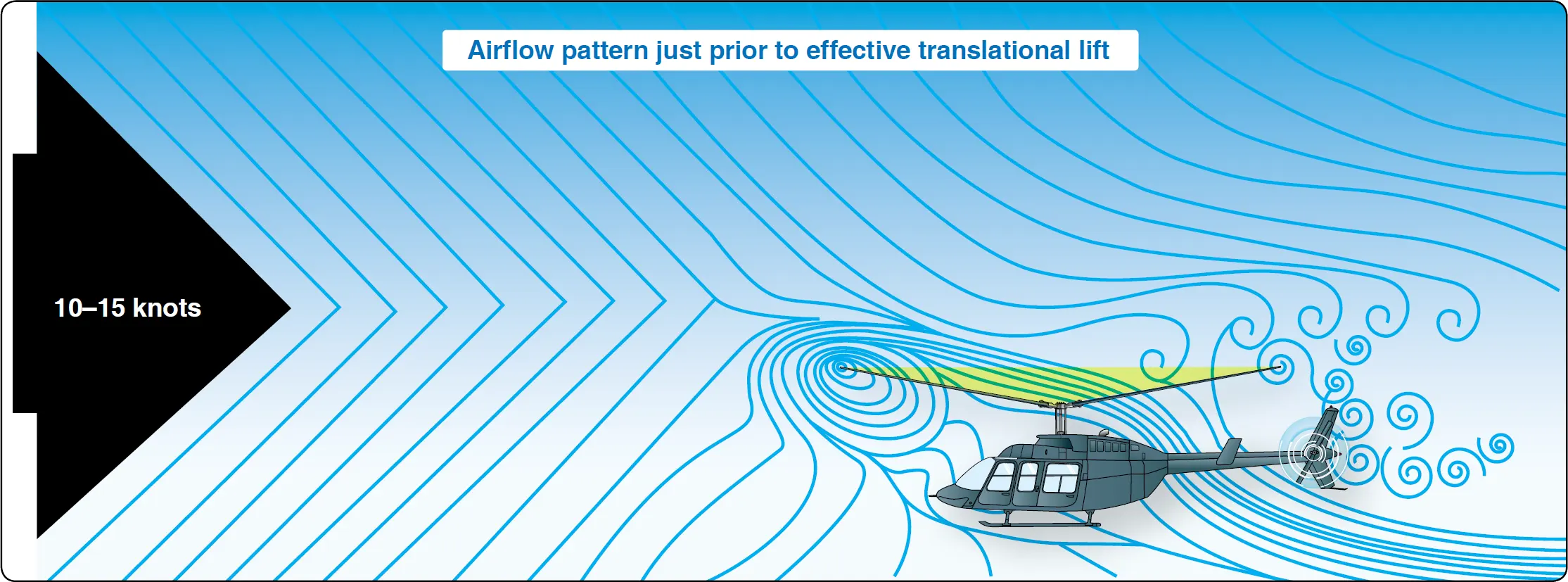
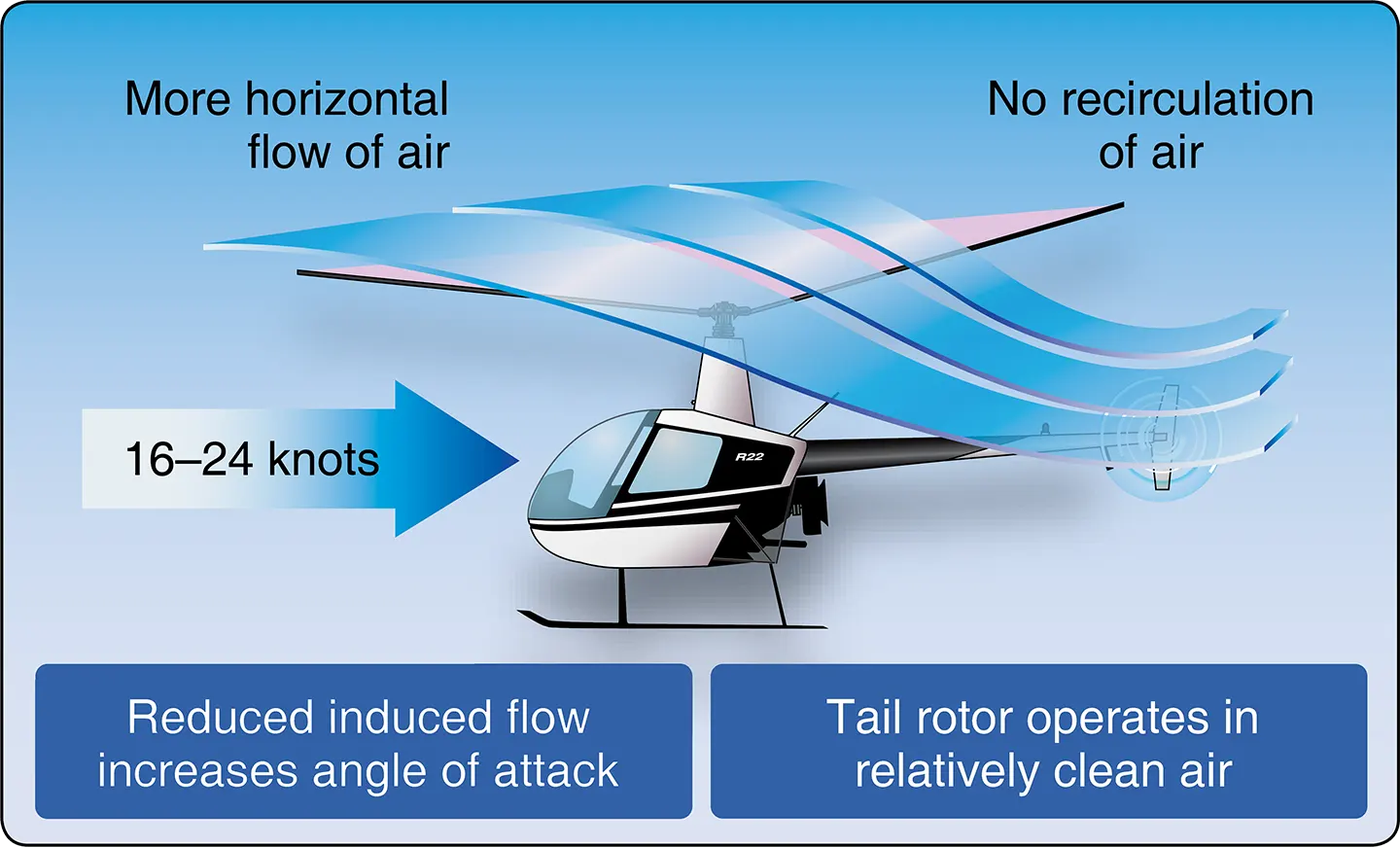
Improved rotor efficiency resulting from directional flight is called translational lift. The efficiency of the hovering rotor system is greatly improved with each knot of incoming wind gained by horizontal movement of the aircraft or surface wind. As the incoming wind produced by aircraft movement or surface wind enters the rotor system, turbulence and vortices are left behind and the flow of air becomes more horizontal. In addition, the tail rotor becomes more aerodynamically efficient during the transition from hover to forward flight. Figures 7 and 8 show the different airflow patterns at different speeds and how airflow affects the efficiency of the tail rotor.
Effective Translational Lift (ETL)
While transitioning to forward flight at about 16 to 24 knots, the helicopter goes through effective translational lift (ETL). As mentioned earlier in the discussion on translational lift, the rotor blades become more efficient as forward airspeed increases. Between 16 and 24 knots, the rotor system completely outruns the recirculation of old vortices and begins to work in relatively undisturbed air. The flow of air through the rotor system is more horizontal; therefore, induced flow and induced drag are reduced. The AOA is effectively increased, which makes the rotor system operate more efficiently. This increased efficiency continues with increased airspeed until the best climb airspeed is reached, and total drag is at its lowest point.
As speed increases, translational lift becomes more effective, nose rises or pitches up, and aircraft rolls to the right. The combined effects of dissymmetry of lift, gyroscopic precession, and transverse flow effect cause this tendency. It is important to understand these effects and anticipate correcting for them. Once the helicopter is transitioning through ETL, the pilot needs to apply forward and left lateral cyclic input to maintain a constant rotor-disk attitude. [Figure 9]
Translational Thrust
Translational thrust occurs when the tail rotor becomes more aerodynamically efficient during the transition from hover to forward flight. As the tail rotor works in progressively less turbulent air, this improved efficiency produces more antitorque thrust, causing the nose of the aircraft to yaw left (with a main rotor turning counterclockwise) and forces the pilot to apply right pedal (decreasing the AOA in the tail rotor blades) in response. In addition, during this period, the airflow affects the horizontal components of the stabilizer found on most helicopters which tends to bring the nose of the helicopter to a more level attitude.
Induced Flow
As the rotor blades rotate, they generate what is called rotational relative wind. This airflow is characterized as flowing parallel and opposite the rotor’s plane of rotation and striking perpendicular to the rotor blade’s leading edge. This rotational relative wind is used to generate lift. As rotor blades produce lift, air is accelerated over the foil and projected downward.
Anytime a helicopter is producing lift, it moves large masses of air vertically and down through the rotor system. This downwash or induced flow can significantly change the efficiency of the rotor system. Rotational relative wind combines with induced flow to form the resultant relative wind. As induced flow increases, resultant relative wind becomes less horizontal. Since AOA is determined by measuring the difference between the chord line and the resultant relative wind, as the resultant relative wind becomes less horizontal, AOA decreases. [Figure 10]
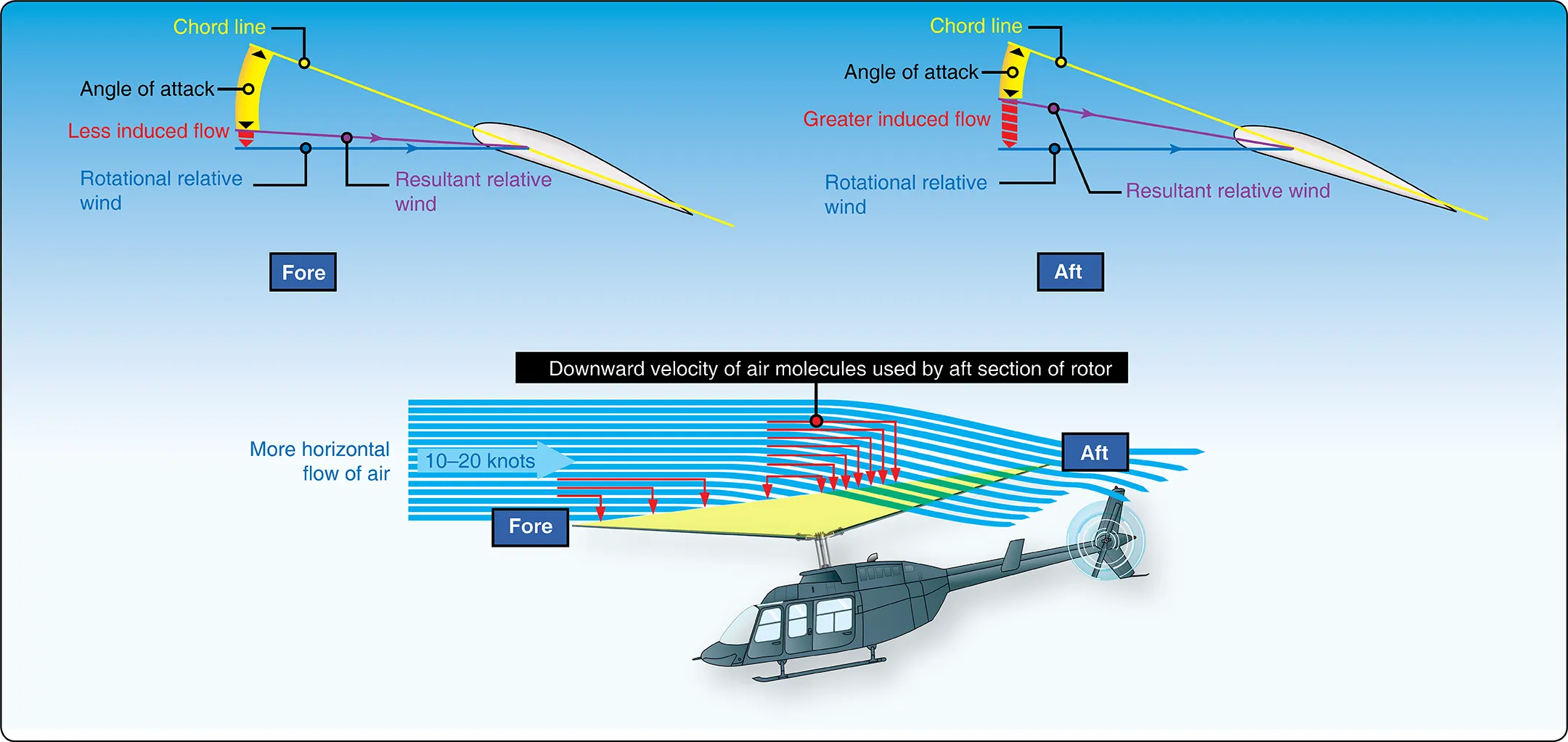
Transverse Flow Effect
As the helicopter accelerates in forward flight, induced flow drops to near zero at the forward disk area and increases at the aft disk area. These differences in lift between the fore and aft portions of the rotor disk are called transverse flow effect. [Figure 9] This increases the AOA at the front disk area causing the rotor blade to flap up, and reduces AOA at the aft disk area causing the rotor blade to flap down. Because the rotor acts like a gyro, maximum displacement occurs 90° in the direction of rotation. The result is a tendency for the helicopter to roll slightly to the right as it accelerates through approximately 20 knots or if the headwind is approximately 20 knots.
Transverse flow effect is recognized by increased vibrations of the helicopter at airspeeds just below ETL on takeoff and after passing through ETL during landing. To counteract transverse flow effect, a cyclic input to the left may be needed.