
Hovering
A stationary hover is a maneuver in which the helicopter is maintained in nearly motionless flight over a reference point at a constant altitude and on a constant heading.
Technique
To maintain a hover over a point, use sideview and peripheral vision to look for small changes in the helicopter’s attitude and altitude. When these changes are noted, make the necessary control inputs before the helicopter starts to move from the point. To detect small variations in altitude or position, the main area of visual attention needs to be some distance from the aircraft, using various points on the helicopter or the tip-path plane as a reference. Looking too closely or looking down leads to overcontrolling. Obviously, in order to remain over a certain point, know where the point is, but do not focus all attention there.
As with a takeoff, the pilot controls altitude with the collective and maintains a constant rpm with the throttle. The cyclic is used to maintain the helicopter’s position; the pedals, to control heading. To maintain the helicopter in a stabilized hover, make small, smooth, coordinated corrections. As the desired effect occurs, remove the correction in order to stop the helicopter’s movement. For example, if the helicopter begins to move rearward, apply a small amount of forward cyclic pressure. However, neutralize this pressure just before the helicopter comes to a stop, or it will begin to move forward.
After experience is gained, a pilot develops a certain “feel” for the helicopter. Small deviations can be felt and seen, so you can make the corrections before the helicopter actually moves. A certain relaxed looseness develops, and controlling the helicopter becomes second nature, rather than a mechanical response.
Common Errors
- Tenseness and slow reactions to movements of the helicopter.
- Failure to allow for lag in cyclic and collective pitch, which leads to overcontrolling. It is very common for a student to get ahead of the helicopter. Due to inertia, it requires some small time period for the helicopter to respond.
- Confusing attitude changes for altitude changes, which results in improper use of the controls.
- Hovering too high, creating a hazardous flight condition. The height velocity chart should be referenced to determine the maximum skid height to hover and safely recover the helicopter should a malfunction occur.
- Hovering too low, resulting in occasional touchdown.
- Becoming overly confident over prepared surfaces when taking off to a hover. Be aware that dynamic rollover accidents usually occur over a level surface.
Hovering Turn
A hovering turn is a maneuver performed at hovering altitude in which the nose of the helicopter is rotated either left or right while maintaining position over a reference point on the surface. Hovering turns can also be made around the mast or tail of the aircraft. The maneuver requires the coordination of all flight controls and demands precise control near the surface. A pilot should maintain a constant altitude, rate of turn, and rpm.
Technique
Initiate the turn in either direction by applying anti-torque pedal pressure toward the desired direction. It should be noted that during a turn to the left, more power is required because left pedal pressure increases the pitch angle of the tail rotor, which, in turn, requires additional power from the engine. A turn to the right requires less power. (On helicopters with a clockwise rotating main rotor, right pedal increases the pitch angle and, therefore, requires more power.)
As the turn begins, use the cyclic as necessary (usually into the wind) to keep the helicopter over the desired spot. To continue the turn, add more pedal pressure as the helicopter turns to the crosswind position. This is because the wind is striking the tail surface and tail rotor area, making it more difficult for the tail to turn into the wind. As pedal pressures increase due to crosswind forces, increase the cyclic pressure into the wind to maintain position. Use the collective with the throttle to maintain a constant altitude and rpm. [Figure 1]
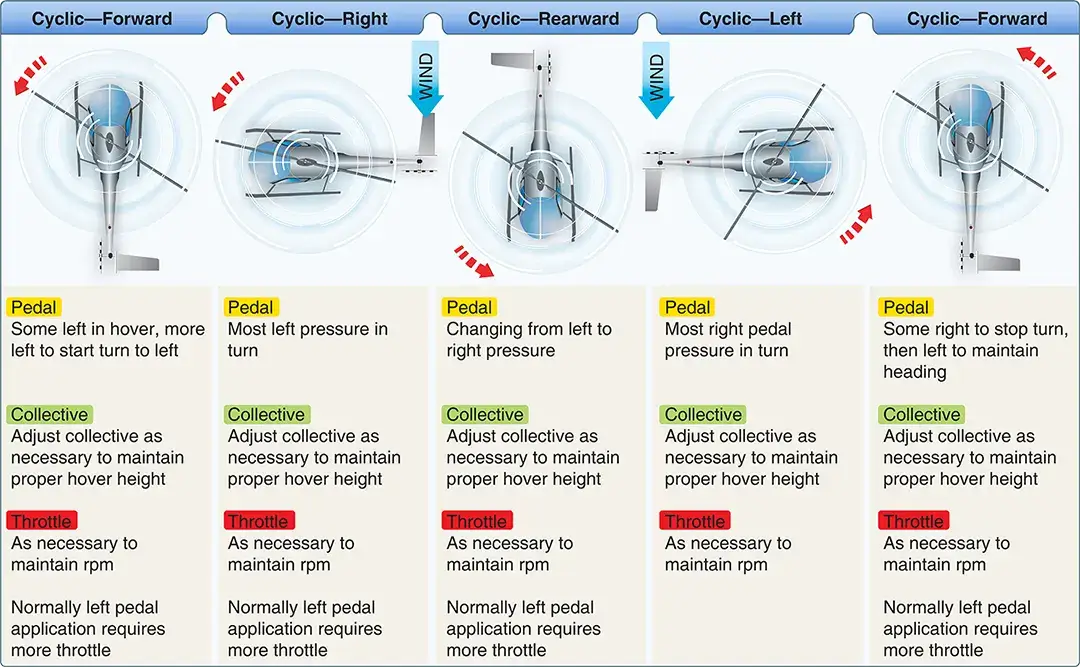
After the 90° portion of the turn, decrease pedal pressure slightly to maintain the same rate of turn. Approaching the 180°, or downwind portion, anticipate opposite pedal pressure due to the tail moving from an upwind position to a downwind position. At this point, the rate of turn has a tendency to increase at a rapid rate due to the tendency of the tail surfaces to weathervane. Because of the tailwind condition, hold rearward cyclic pressure to keep the helicopter over the same spot.
The horizontal stabilizer has a tendency to lift the tail during a tailwind condition. This is the most difficult portion of the hovering turn. Horizontal and vertical stabilizers have several different designs and locations, including the canted stabilizers used on some Hughes and Schweizer helicopters. The primary purpose of the vertical stabilizer is to unload the work of the antitorque system and to aid in trimming the helicopter in flight should the antitorque system fail. The horizontal stabilizer provides for a more usable CG range and aids in trimming the helicopter longitudinally.
Because of the helicopter’s tendency to weathervane, maintaining the same rate of turn from the 180° position actually requires some pedal pressure opposite the direction of turn. If a pilot does not apply opposite pedal pressure, the helicopter tends to turn at a faster rate. The amount of pedal pressure and cyclic deflection throughout the turn depends on the wind velocity. As the turn is finished on the upwind heading, apply opposite pedal pressure to stop the turn. Gradually apply forward cyclic pressure to keep the helicopter from drifting.
Control pressures and direction of application change continuously throughout the turn. The most dramatic change is the pedal pressure (and corresponding power requirement) necessary to control the rate of turn as the helicopter moves through the downwind portion of the maneuver.
Turns can be made in either direction; however, in a high wind condition, the tail rotor may not be able to produce enough thrust, which means the pilot cannot control a turn to the right in a counterclockwise rotor system. Therefore, if control is ever questionable, first attempt to make a 90° turn to the left. If sufficient tail rotor thrust exists to turn the helicopter crosswind in a left turn, a right turn can be successfully controlled. The opposite applies to helicopters with clockwise rotor systems. In this case, start the turn to the right. Hovering turns should be avoided in winds strong enough to preclude sufficient aft cyclic control to maintain the helicopter on the selected surface reference point when headed downwind. Check the flight manual for the manufacturer’s recommendations for this limitation.
Common Errors
- Failing to maintain a slow, constant rate of turn.
- Failing to maintain position over the reference point.
- Failing to maintain rpm within normal range.
- Failing to maintain constant altitude.
- Failing to use the antitorque pedals properly.
Hovering-Forward Flight
Forward hovering flight is normally used to move a helicopter to a specific location, and it may begin from a stationary hover. During the maneuver, constant groundspeed, altitude, and heading should be maintained.
Technique
Before starting, pick out two references directly in front and in line with the helicopter. These reference points should be kept in line throughout the maneuver. [Figure 2]
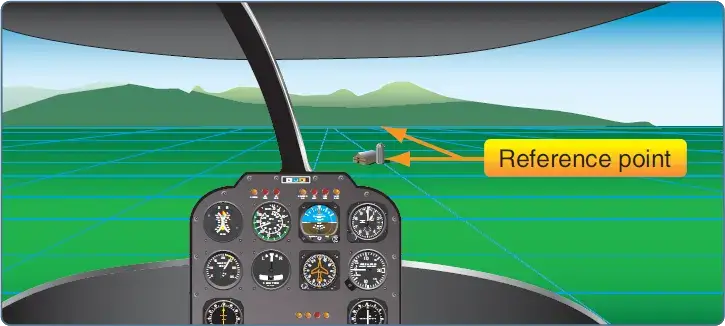
Begin the maneuver from a normal hovering altitude by applying forward pressure on the cyclic. As movement begins, return the cyclic toward the neutral position to maintain low groundspeed—no faster than a brisk walk. Throughout the maneuver, maintain a constant groundspeed and path over the ground with the cyclic, a constant heading with the antitorque pedals, altitude with the collective, and the proper rpm with the throttle.
To stop the forward movement, apply rearward cyclic pressure until the helicopter stops. As forward motion stops, return the cyclic to the neutral position to prevent rearward movement. Forward movement can also be stopped by simply applying rearward pressure to level the helicopter and allowing it to drift to a stop.
Common Errors
- Exaggerated movement of the cyclic, resulting in erratic movement over the surface.
- Failure to use proper antitorque pedal control, resulting in excessive heading change.
- Failure to maintain desired hovering altitude.
- Failure to maintain proper rpm.
- Failure to maintain alignment with direction of travel.
Hovering-Sideward Flight
Sideward hovering flight may be necessary to move the helicopter to a specific area when conditions make it impossible to use forward flight. During the maneuver, a constant groundspeed, altitude, and heading should be maintained.
Technique
Before starting sideward hovering flight, ensure the area for the hover is clear, especially at the tail rotor. Constantly monitor hover height and tail rotor clearance during all hovering maneuvers to prevent dynamic rollover or tail rotor strikes to the ground. Then, pick two points of in-line reference in the direction of sideward hovering flight to help maintain the proper ground track. These reference points should be kept in line throughout the maneuver. [Figure 3]
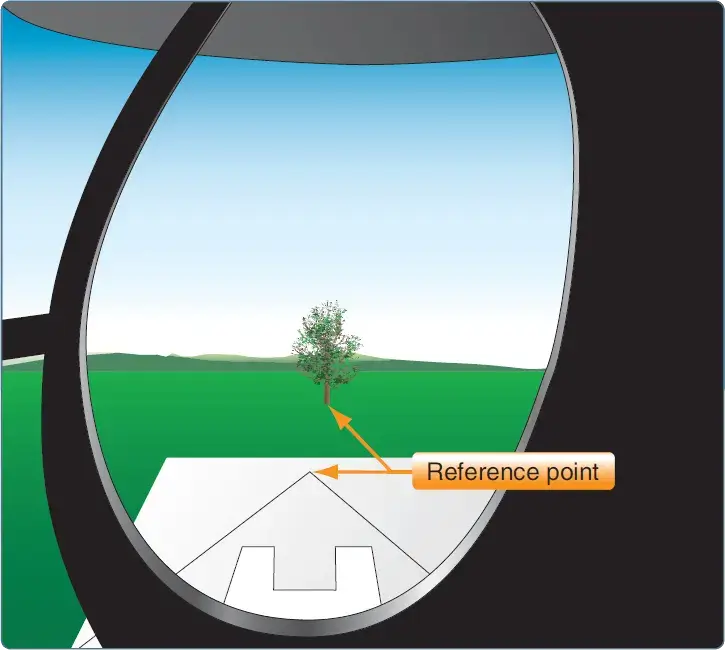
Begin the maneuver from a normal hovering altitude by applying cyclic toward the side in which the movement is desired. As the movement begins, return the cyclic toward the neutral position to maintain low groundspeed—no faster than a brisk walk. Throughout the maneuver, maintain a constant groundspeed and ground track with cyclic. Maintain heading, which in this maneuver is perpendicular to the ground track, with the antitorque pedals, and a constant altitude with the collective. Use the throttle to maintain the proper operating rpm. Be aware that the nose tends to weathervane into the wind. Changes in the pedal position will change the rpm and must be corrected by collective and/or throttle changes to maintain altitude.
To stop the sideward movement, apply cyclic pressure in the direction opposite to that of movement and hold it until the helicopter stops. As motion stops, return the cyclic to the neutral position to prevent movement in the opposite direction. Applying sufficient opposite cyclic pressure to level the helicopter may also stop sideward movement. The helicopter then drifts to a stop.
Common Errors
- Exaggerated movement of the cyclic, resulting in overcontrolling and erratic movement over the surface.
- Failure to use proper antitorque pedal control, resulting in excessive heading change.
- Failure to maintain desired hovering altitude.
- Failure to maintain proper rpm.
- Failure to make sure the area is clear prior to starting the maneuver.
Hovering-Rearward Flight
Rearward hovering flight may be necessary to move the helicopter to a specific area when the situation is such that forward or sideward hovering flight cannot be used. During the maneuver, maintain a constant groundspeed, altitude, and heading. Due to the limited visibility behind a helicopter, it is important that the area behind the helicopter be cleared before beginning the maneuver. Use of ground personnel is recommended.
Technique
Before starting rearward hovering flight, pick out two reference points in front of, and in line with the helicopter just like hovering forward. [Figure 2] The movement of the helicopter should be such that these points remain in line.
Begin the maneuver from a normal hovering altitude by applying rearward pressure on the cyclic. After the movement has begun, position the cyclic to maintain a slow groundspeed—no faster than a brisk walk. Throughout the maneuver, maintain constant groundspeed and ground track with the cyclic, a constant heading with the antitorque pedals, constant altitude with the collective, and the proper rpm with the throttle.
To stop the rearward movement, apply forward cyclic and hold it until the helicopter stops. As the motion stops, return the cyclic to the neutral position. Also, as in the case of forward and sideward hovering flight, opposite cyclic can be used to level the helicopter and let it drift to a stop. Tail rotor clearance must be maintained. Generally, a higher-than-normal hover altitude is preferred.
Common Errors
- Exaggerated movement of the cyclic resulting in overcontrolling and an uneven movement over the surface.
- Failure to use proper antitorque pedal control, resulting in excessive heading change.
- Failure to maintain desired hovering altitude.
- Failure to maintain proper rpm.
- Failure to make sure the area is clear prior to starting the maneuver.