
Approaches
An approach is the transition from traffic pattern altitude to either a hover or to the surface. The approach should terminate at the hover altitude with the rate of descent and groundspeed reaching zero at the same time. Approaches are categorized according to the angle of descent as normal, steep, or shallow. In this post, concentration is on the normal approach. Steep Approach and Shallow Approach are discussed in the the Advanced Flight Maneuvers section.
Use the type of approach best suited to the existing conditions. These conditions may include obstacles, size and surface of the landing area, density altitude, wind direction and speed, and weight. Regardless of the type of approach, it should always be made to a specific, predetermined landing spot.
Normal Approach to a Hover
A normal approach uses a descent angle of between 7° and 12°.
Technique
On final approach, at the recommended approach airspeed and at approximately 300 feet AGL, the helicopter should be on the correct ground track (or ground alignment) for the intended landing site, but the axis of the helicopter does not have to be aligned until about 100′ AGL to facilitate a controlled approach. [Figure]
Just prior to reaching the desired approach angle, begin the approach by lowering the collective sufficiently to get the helicopter decelerating and descending down the approach angle. With the decrease in the collective, the nose tends to pitch down, requiring aft cyclic to maintain the recommended approach airspeed attitude. Adjust antitorque pedals, as necessary, to maintain trim. Pilots should visualize the angle from the landing point to the middle of the skids or landing gear underneath them in the cockpit and maneuver the helicopter down that imaginary slope until the helicopter is at a hover centered over the landing point, or touching down centered on the landing point. The most important standard for a normal approach is maintaining a consistent angle of approach to the termination point. The collective controls the angle of approach. Use the cyclic to control the rate of closure or how fast the helicopter is moving towards the touchdown point. Maintain entry airspeed until the apparent groundspeed and rate of closure appear to be increasing. At this point, slowly begin decelerating with slight aft cyclic, and smoothly lower the collective to maintain approach angle. Use the cyclic to maintain a rate of closure equivalent to a brisk walk.
At approximately 25 knots, depending on wind, the helicopter begins to lose effective translational lift. To compensate for loss of effective translational lift, increase the collective to maintain the approach angle, while maintaining the proper rpm. The increase of collective pitch tends to make the nose rise, requiring forward cyclic to maintain the proper rate of closure.
As the helicopter approaches the recommended hover altitude, increase the collective sufficiently to maintain the hover. Helicopters require near maximum power to land because the inertia of the helicopter in a descent must be overcome by lift in the rotor system. At the same time, apply aft cyclic to stop any forward movement while controlling the heading with antitorque pedals.
Common Errors
- Failing to maintain proper rpm during the entire approach.
- Improper use of the collective in controlling the angle of descent.
- Failing to make antitorque pedal corrections to compensate for collective changes during the approach.
- Maintaining a constant airspeed on final approach instead of an apparent brisk walk.
- Failing to simultaneously arrive at hovering altitude and attitude with zero groundspeed.
- Low rpm in transition to the hover at the end of the approach.
- Using too much aft cyclic close to the surface, which may result in tail rotor strikes.
- Failure to crab above 100’AGL and slip below 100’AGL.
Normal Approach to the Surface
A normal approach to the surface or a no-hover landing is often used if loose snow or dusty surface conditions exist. These situations could cause severely restricted visibility, or the engine could possibly ingest debris when the helicopter comes to a hover. The approach is the same as the normal approach to a hover; however, instead of terminating at a hover, continue the approach to touchdown. Touchdown should occur with the skids level, zero groundspeed, and a rate of descent approaching zero.
Technique
As the helicopter nears the surface, increase the collective, as necessary, to cushion the landing on the surface, terminate in a skids-level attitude with no forward movement.
Common Errors
- Terminating to a hover, and then making a vertical landing.
- Touching down with forward movement.
- Approaching too slow, requiring the use of excessive power during the termination.
- Approaching too fast, causing a hard landing.
- Not maintaining skids aligned with direction of travel at touchdown. Any movement or misalignment of the skids or gear can induce dynamic rollover.
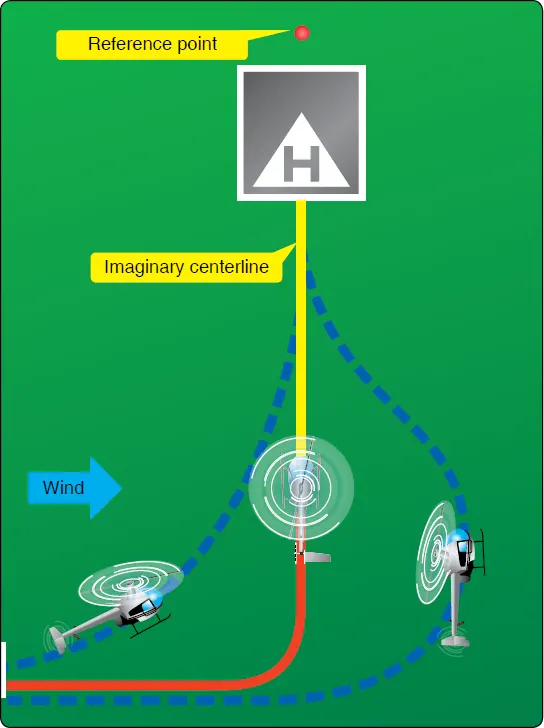
Crosswind During Approaches
During a crosswind approach, crab into the wind. At approximately 50 feet of altitude, use a slip to align the fuselage with the ground track. The rotor is tilted into the wind with cyclic pressure so that the sideward movement of the helicopter and wind drift counteracts each other. Maintain the heading and ground track with the antitorque pedals. Under crosswind approaches, ground track is always controlled by the cyclic movement. The heading of the helicopter in hovering maneuvers is always controlled by the pedals. The collective controls power, which is altitude at a hover. This technique should be used on any type of crosswind approach, whether it is a shallow, normal, or steep approach.
Go-Around
A go-around is a procedure for remaining airborne after an intended landing is discontinued. A go-around may be necessary when:
- Instructed by the control tower.
- Traffic conflict occurs.
- The helicopter is in a position from which it is not safe to continue the approach. Any time an approach is uncomfortable, incorrect, or potentially dangerous, abandon the approach. The decision to make a go-around should be positive and initiated before a critical situation develops. When the decision is made, carry it out without hesitation. In most cases, when initiating the go-around, power is at a low setting. Therefore, the first response is to increase collective to takeoff power. This movement is coordinated with the throttle to maintain rpm, and with the proper antitorque pedal to control heading. Then, establish a climb attitude and maintain climb speed to go around for another approach.